wip
This commit is contained in:
39
common/SConscript
Normal file
39
common/SConscript
Normal file
@@ -0,0 +1,39 @@
|
||||
Import('env', 'envCython', 'arch')
|
||||
|
||||
common_libs = [
|
||||
'params.cc',
|
||||
'swaglog.cc',
|
||||
'util.cc',
|
||||
'i2c.cc',
|
||||
'watchdog.cc',
|
||||
'ratekeeper.cc'
|
||||
]
|
||||
|
||||
if arch != "Darwin":
|
||||
common_libs.append('gpio.cc')
|
||||
|
||||
_common = env.Library('common', common_libs, LIBS="json11")
|
||||
|
||||
files = [
|
||||
'clutil.cc',
|
||||
]
|
||||
|
||||
_gpucommon = env.Library('gpucommon', files)
|
||||
Export('_common', '_gpucommon')
|
||||
|
||||
if GetOption('extras'):
|
||||
env.Program('tests/test_common',
|
||||
['tests/test_runner.cc', 'tests/test_params.cc', 'tests/test_util.cc', 'tests/test_swaglog.cc'],
|
||||
LIBS=[_common, 'json11', 'zmq', 'pthread'])
|
||||
|
||||
# Cython bindings
|
||||
params_python = envCython.Program('params_pyx.so', 'params_pyx.pyx', LIBS=envCython['LIBS'] + [_common, 'zmq', 'json11'])
|
||||
|
||||
SConscript([
|
||||
'transformations/SConscript',
|
||||
])
|
||||
|
||||
Import('transformations_python')
|
||||
common_python = [params_python, transformations_python]
|
||||
|
||||
Export('common_python')
|
||||
200
common/clutil.cc
Normal file
200
common/clutil.cc
Normal file
@@ -0,0 +1,200 @@
|
||||
#include "common/clutil.h"
|
||||
|
||||
#include <cassert>
|
||||
#include <iostream>
|
||||
#include <memory>
|
||||
|
||||
#include "common/util.h"
|
||||
#include "common/swaglog.h"
|
||||
|
||||
namespace { // helper functions
|
||||
|
||||
template <typename Func, typename Id, typename Name>
|
||||
std::string get_info(Func get_info_func, Id id, Name param_name) {
|
||||
size_t size = 0;
|
||||
CL_CHECK(get_info_func(id, param_name, 0, NULL, &size));
|
||||
std::string info(size, '\0');
|
||||
CL_CHECK(get_info_func(id, param_name, size, info.data(), NULL));
|
||||
return info;
|
||||
}
|
||||
inline std::string get_platform_info(cl_platform_id id, cl_platform_info name) { return get_info(&clGetPlatformInfo, id, name); }
|
||||
inline std::string get_device_info(cl_device_id id, cl_device_info name) { return get_info(&clGetDeviceInfo, id, name); }
|
||||
|
||||
void cl_print_info(cl_platform_id platform, cl_device_id device) {
|
||||
size_t work_group_size = 0;
|
||||
cl_device_type device_type = 0;
|
||||
clGetDeviceInfo(device, CL_DEVICE_MAX_WORK_GROUP_SIZE, sizeof(work_group_size), &work_group_size, NULL);
|
||||
clGetDeviceInfo(device, CL_DEVICE_TYPE, sizeof(device_type), &device_type, NULL);
|
||||
const char *type_str = "Other...";
|
||||
switch (device_type) {
|
||||
case CL_DEVICE_TYPE_CPU: type_str ="CL_DEVICE_TYPE_CPU"; break;
|
||||
case CL_DEVICE_TYPE_GPU: type_str = "CL_DEVICE_TYPE_GPU"; break;
|
||||
case CL_DEVICE_TYPE_ACCELERATOR: type_str = "CL_DEVICE_TYPE_ACCELERATOR"; break;
|
||||
}
|
||||
|
||||
LOGD("vendor: %s", get_platform_info(platform, CL_PLATFORM_VENDOR).c_str());
|
||||
LOGD("platform version: %s", get_platform_info(platform, CL_PLATFORM_VERSION).c_str());
|
||||
LOGD("profile: %s", get_platform_info(platform, CL_PLATFORM_PROFILE).c_str());
|
||||
LOGD("extensions: %s", get_platform_info(platform, CL_PLATFORM_EXTENSIONS).c_str());
|
||||
LOGD("name: %s", get_device_info(device, CL_DEVICE_NAME).c_str());
|
||||
LOGD("device version: %s", get_device_info(device, CL_DEVICE_VERSION).c_str());
|
||||
LOGD("max work group size: %zu", work_group_size);
|
||||
LOGD("type = %d, %s", (int)device_type, type_str);
|
||||
}
|
||||
|
||||
void cl_print_build_errors(cl_program program, cl_device_id device) {
|
||||
cl_build_status status;
|
||||
clGetProgramBuildInfo(program, device, CL_PROGRAM_BUILD_STATUS, sizeof(status), &status, NULL);
|
||||
size_t log_size;
|
||||
clGetProgramBuildInfo(program, device, CL_PROGRAM_BUILD_LOG, 0, NULL, &log_size);
|
||||
std::string log(log_size, '\0');
|
||||
clGetProgramBuildInfo(program, device, CL_PROGRAM_BUILD_LOG, log_size, &log[0], NULL);
|
||||
|
||||
LOGE("build failed; status=%d, log: %s", status, log.c_str());
|
||||
}
|
||||
|
||||
} // namespace
|
||||
|
||||
cl_device_id cl_get_device_id(cl_device_type device_type) {
|
||||
cl_uint num_platforms = 0;
|
||||
CL_CHECK(clGetPlatformIDs(0, NULL, &num_platforms));
|
||||
std::unique_ptr<cl_platform_id[]> platform_ids = std::make_unique<cl_platform_id[]>(num_platforms);
|
||||
CL_CHECK(clGetPlatformIDs(num_platforms, &platform_ids[0], NULL));
|
||||
|
||||
for (size_t i = 0; i < num_platforms; ++i) {
|
||||
LOGD("platform[%zu] CL_PLATFORM_NAME: %s", i, get_platform_info(platform_ids[i], CL_PLATFORM_NAME).c_str());
|
||||
|
||||
// Get first device
|
||||
if (cl_device_id device_id = NULL; clGetDeviceIDs(platform_ids[i], device_type, 1, &device_id, NULL) == 0 && device_id) {
|
||||
cl_print_info(platform_ids[i], device_id);
|
||||
return device_id;
|
||||
}
|
||||
}
|
||||
LOGE("No valid openCL platform found");
|
||||
assert(0);
|
||||
return nullptr;
|
||||
}
|
||||
|
||||
cl_context cl_create_context(cl_device_id device_id) {
|
||||
return CL_CHECK_ERR(clCreateContext(NULL, 1, &device_id, NULL, NULL, &err));
|
||||
}
|
||||
|
||||
cl_program cl_program_from_file(cl_context ctx, cl_device_id device_id, const char* path, const char* args) {
|
||||
return cl_program_from_source(ctx, device_id, util::read_file(path), args);
|
||||
}
|
||||
|
||||
cl_program cl_program_from_source(cl_context ctx, cl_device_id device_id, const std::string& src, const char* args) {
|
||||
const char *csrc = src.c_str();
|
||||
cl_program prg = CL_CHECK_ERR(clCreateProgramWithSource(ctx, 1, &csrc, NULL, &err));
|
||||
if (int err = clBuildProgram(prg, 1, &device_id, args, NULL, NULL); err != 0) {
|
||||
cl_print_build_errors(prg, device_id);
|
||||
assert(0);
|
||||
}
|
||||
return prg;
|
||||
}
|
||||
|
||||
cl_program cl_program_from_binary(cl_context ctx, cl_device_id device_id, const uint8_t* binary, size_t length, const char* args) {
|
||||
cl_program prg = CL_CHECK_ERR(clCreateProgramWithBinary(ctx, 1, &device_id, &length, &binary, NULL, &err));
|
||||
if (int err = clBuildProgram(prg, 1, &device_id, args, NULL, NULL); err != 0) {
|
||||
cl_print_build_errors(prg, device_id);
|
||||
assert(0);
|
||||
}
|
||||
return prg;
|
||||
}
|
||||
|
||||
// Given a cl code and return a string representation
|
||||
#define CL_ERR_TO_STR(err) case err: return #err
|
||||
const char* cl_get_error_string(int err) {
|
||||
switch (err) {
|
||||
CL_ERR_TO_STR(CL_SUCCESS);
|
||||
CL_ERR_TO_STR(CL_DEVICE_NOT_FOUND);
|
||||
CL_ERR_TO_STR(CL_DEVICE_NOT_AVAILABLE);
|
||||
CL_ERR_TO_STR(CL_COMPILER_NOT_AVAILABLE);
|
||||
CL_ERR_TO_STR(CL_MEM_OBJECT_ALLOCATION_FAILURE);
|
||||
CL_ERR_TO_STR(CL_OUT_OF_RESOURCES);
|
||||
CL_ERR_TO_STR(CL_OUT_OF_HOST_MEMORY);
|
||||
CL_ERR_TO_STR(CL_PROFILING_INFO_NOT_AVAILABLE);
|
||||
CL_ERR_TO_STR(CL_MEM_COPY_OVERLAP);
|
||||
CL_ERR_TO_STR(CL_IMAGE_FORMAT_MISMATCH);
|
||||
CL_ERR_TO_STR(CL_IMAGE_FORMAT_NOT_SUPPORTED);
|
||||
CL_ERR_TO_STR(CL_MAP_FAILURE);
|
||||
CL_ERR_TO_STR(CL_MISALIGNED_SUB_BUFFER_OFFSET);
|
||||
CL_ERR_TO_STR(CL_EXEC_STATUS_ERROR_FOR_EVENTS_IN_WAIT_LIST);
|
||||
CL_ERR_TO_STR(CL_COMPILE_PROGRAM_FAILURE);
|
||||
CL_ERR_TO_STR(CL_LINKER_NOT_AVAILABLE);
|
||||
CL_ERR_TO_STR(CL_LINK_PROGRAM_FAILURE);
|
||||
CL_ERR_TO_STR(CL_DEVICE_PARTITION_FAILED);
|
||||
CL_ERR_TO_STR(CL_KERNEL_ARG_INFO_NOT_AVAILABLE);
|
||||
CL_ERR_TO_STR(CL_INVALID_VALUE);
|
||||
CL_ERR_TO_STR(CL_INVALID_DEVICE_TYPE);
|
||||
CL_ERR_TO_STR(CL_INVALID_PLATFORM);
|
||||
CL_ERR_TO_STR(CL_INVALID_DEVICE);
|
||||
CL_ERR_TO_STR(CL_INVALID_CONTEXT);
|
||||
CL_ERR_TO_STR(CL_INVALID_QUEUE_PROPERTIES);
|
||||
CL_ERR_TO_STR(CL_INVALID_COMMAND_QUEUE);
|
||||
CL_ERR_TO_STR(CL_INVALID_HOST_PTR);
|
||||
CL_ERR_TO_STR(CL_INVALID_MEM_OBJECT);
|
||||
CL_ERR_TO_STR(CL_INVALID_IMAGE_FORMAT_DESCRIPTOR);
|
||||
CL_ERR_TO_STR(CL_INVALID_IMAGE_SIZE);
|
||||
CL_ERR_TO_STR(CL_INVALID_SAMPLER);
|
||||
CL_ERR_TO_STR(CL_INVALID_BINARY);
|
||||
CL_ERR_TO_STR(CL_INVALID_BUILD_OPTIONS);
|
||||
CL_ERR_TO_STR(CL_INVALID_PROGRAM);
|
||||
CL_ERR_TO_STR(CL_INVALID_PROGRAM_EXECUTABLE);
|
||||
CL_ERR_TO_STR(CL_INVALID_KERNEL_NAME);
|
||||
CL_ERR_TO_STR(CL_INVALID_KERNEL_DEFINITION);
|
||||
CL_ERR_TO_STR(CL_INVALID_KERNEL);
|
||||
CL_ERR_TO_STR(CL_INVALID_ARG_INDEX);
|
||||
CL_ERR_TO_STR(CL_INVALID_ARG_VALUE);
|
||||
CL_ERR_TO_STR(CL_INVALID_ARG_SIZE);
|
||||
CL_ERR_TO_STR(CL_INVALID_KERNEL_ARGS);
|
||||
CL_ERR_TO_STR(CL_INVALID_WORK_DIMENSION);
|
||||
CL_ERR_TO_STR(CL_INVALID_WORK_GROUP_SIZE);
|
||||
CL_ERR_TO_STR(CL_INVALID_WORK_ITEM_SIZE);
|
||||
CL_ERR_TO_STR(CL_INVALID_GLOBAL_OFFSET);
|
||||
CL_ERR_TO_STR(CL_INVALID_EVENT_WAIT_LIST);
|
||||
CL_ERR_TO_STR(CL_INVALID_EVENT);
|
||||
CL_ERR_TO_STR(CL_INVALID_OPERATION);
|
||||
CL_ERR_TO_STR(CL_INVALID_GL_OBJECT);
|
||||
CL_ERR_TO_STR(CL_INVALID_BUFFER_SIZE);
|
||||
CL_ERR_TO_STR(CL_INVALID_MIP_LEVEL);
|
||||
CL_ERR_TO_STR(CL_INVALID_GLOBAL_WORK_SIZE);
|
||||
CL_ERR_TO_STR(CL_INVALID_PROPERTY);
|
||||
CL_ERR_TO_STR(CL_INVALID_IMAGE_DESCRIPTOR);
|
||||
CL_ERR_TO_STR(CL_INVALID_COMPILER_OPTIONS);
|
||||
CL_ERR_TO_STR(CL_INVALID_LINKER_OPTIONS);
|
||||
CL_ERR_TO_STR(CL_INVALID_DEVICE_PARTITION_COUNT);
|
||||
case -69: return "CL_INVALID_PIPE_SIZE";
|
||||
case -70: return "CL_INVALID_DEVICE_QUEUE";
|
||||
case -71: return "CL_INVALID_SPEC_ID";
|
||||
case -72: return "CL_MAX_SIZE_RESTRICTION_EXCEEDED";
|
||||
case -1002: return "CL_INVALID_D3D10_DEVICE_KHR";
|
||||
case -1003: return "CL_INVALID_D3D10_RESOURCE_KHR";
|
||||
case -1004: return "CL_D3D10_RESOURCE_ALREADY_ACQUIRED_KHR";
|
||||
case -1005: return "CL_D3D10_RESOURCE_NOT_ACQUIRED_KHR";
|
||||
case -1006: return "CL_INVALID_D3D11_DEVICE_KHR";
|
||||
case -1007: return "CL_INVALID_D3D11_RESOURCE_KHR";
|
||||
case -1008: return "CL_D3D11_RESOURCE_ALREADY_ACQUIRED_KHR";
|
||||
case -1009: return "CL_D3D11_RESOURCE_NOT_ACQUIRED_KHR";
|
||||
case -1010: return "CL_INVALID_DX9_MEDIA_ADAPTER_KHR";
|
||||
case -1011: return "CL_INVALID_DX9_MEDIA_SURFACE_KHR";
|
||||
case -1012: return "CL_DX9_MEDIA_SURFACE_ALREADY_ACQUIRED_KHR";
|
||||
case -1013: return "CL_DX9_MEDIA_SURFACE_NOT_ACQUIRED_KHR";
|
||||
case -1093: return "CL_INVALID_EGL_OBJECT_KHR";
|
||||
case -1092: return "CL_EGL_RESOURCE_NOT_ACQUIRED_KHR";
|
||||
case -1001: return "CL_PLATFORM_NOT_FOUND_KHR";
|
||||
case -1057: return "CL_DEVICE_PARTITION_FAILED_EXT";
|
||||
case -1058: return "CL_INVALID_PARTITION_COUNT_EXT";
|
||||
case -1059: return "CL_INVALID_PARTITION_NAME_EXT";
|
||||
case -1094: return "CL_INVALID_ACCELERATOR_INTEL";
|
||||
case -1095: return "CL_INVALID_ACCELERATOR_TYPE_INTEL";
|
||||
case -1096: return "CL_INVALID_ACCELERATOR_DESCRIPTOR_INTEL";
|
||||
case -1097: return "CL_ACCELERATOR_TYPE_NOT_SUPPORTED_INTEL";
|
||||
case -1000: return "CL_INVALID_GL_SHAREGROUP_REFERENCE_KHR";
|
||||
case -1098: return "CL_INVALID_VA_API_MEDIA_ADAPTER_INTEL";
|
||||
case -1099: return "CL_INVALID_VA_API_MEDIA_SURFACE_INTEL";
|
||||
case -1100: return "CL_VA_API_MEDIA_SURFACE_ALREADY_ACQUIRED_INTEL";
|
||||
case -1101: return "CL_VA_API_MEDIA_SURFACE_NOT_ACQUIRED_INTEL";
|
||||
default: return "CL_UNKNOWN_ERROR";
|
||||
}
|
||||
}
|
||||
29
common/clutil.h
Normal file
29
common/clutil.h
Normal file
@@ -0,0 +1,29 @@
|
||||
#pragma once
|
||||
|
||||
#ifdef __APPLE__
|
||||
#include <OpenCL/cl.h>
|
||||
#else
|
||||
#include <CL/cl.h>
|
||||
#endif
|
||||
|
||||
#include <string>
|
||||
|
||||
#define CL_CHECK(_expr) \
|
||||
do { \
|
||||
assert(CL_SUCCESS == (_expr)); \
|
||||
} while (0)
|
||||
|
||||
#define CL_CHECK_ERR(_expr) \
|
||||
({ \
|
||||
cl_int err = CL_INVALID_VALUE; \
|
||||
__typeof__(_expr) _ret = _expr; \
|
||||
assert(_ret&& err == CL_SUCCESS); \
|
||||
_ret; \
|
||||
})
|
||||
|
||||
cl_device_id cl_get_device_id(cl_device_type device_type);
|
||||
cl_context cl_create_context(cl_device_id device_id);
|
||||
cl_program cl_program_from_source(cl_context ctx, cl_device_id device_id, const std::string& src, const char* args = nullptr);
|
||||
cl_program cl_program_from_binary(cl_context ctx, cl_device_id device_id, const uint8_t* binary, size_t length, const char* args = nullptr);
|
||||
cl_program cl_program_from_file(cl_context ctx, cl_device_id device_id, const char* path, const char* args);
|
||||
const char* cl_get_error_string(int err);
|
||||
@@ -10,6 +10,8 @@ class Conversions:
|
||||
MPH_TO_MS = MPH_TO_KPH * KPH_TO_MS
|
||||
METER_TO_FOOT = 3.28084
|
||||
FOOT_TO_METER = 1 / METER_TO_FOOT
|
||||
CM_TO_INCH = METER_TO_FOOT / 100.0 * 12.0;
|
||||
INCH_TO_CM = 1.0 / CM_TO_INCH;
|
||||
MS_TO_KNOTS = 1.9438
|
||||
KNOTS_TO_MS = 1. / MS_TO_KNOTS
|
||||
|
||||
|
||||
@@ -1,7 +1,6 @@
|
||||
import os
|
||||
import tempfile
|
||||
import contextlib
|
||||
from typing import Optional
|
||||
|
||||
|
||||
class CallbackReader:
|
||||
@@ -24,7 +23,7 @@ class CallbackReader:
|
||||
|
||||
|
||||
@contextlib.contextmanager
|
||||
def atomic_write_in_dir(path: str, mode: str = 'w', buffering: int = -1, encoding: Optional[str] = None, newline: Optional[str] = None,
|
||||
def atomic_write_in_dir(path: str, mode: str = 'w', buffering: int = -1, encoding: str = None, newline: str = None,
|
||||
overwrite: bool = False):
|
||||
"""Write to a file atomically using a temporary file in the same directory as the destination file."""
|
||||
dir_name = os.path.dirname(path)
|
||||
|
||||
84
common/gpio.cc
Normal file
84
common/gpio.cc
Normal file
@@ -0,0 +1,84 @@
|
||||
#include "common/gpio.h"
|
||||
|
||||
#include <string>
|
||||
|
||||
#ifdef __APPLE__
|
||||
int gpio_init(int pin_nr, bool output) {
|
||||
return 0;
|
||||
}
|
||||
|
||||
int gpio_set(int pin_nr, bool high) {
|
||||
return 0;
|
||||
}
|
||||
|
||||
int gpiochip_get_ro_value_fd(const char* consumer_label, int gpiochiop_id, int pin_nr) {
|
||||
return 0;
|
||||
}
|
||||
|
||||
#else
|
||||
|
||||
#include <fcntl.h>
|
||||
#include <unistd.h>
|
||||
|
||||
#include <cstring>
|
||||
#include <linux/gpio.h>
|
||||
#include <sys/ioctl.h>
|
||||
|
||||
#include "common/util.h"
|
||||
#include "common/swaglog.h"
|
||||
|
||||
int gpio_init(int pin_nr, bool output) {
|
||||
char pin_dir_path[50];
|
||||
int pin_dir_path_len = snprintf(pin_dir_path, sizeof(pin_dir_path),
|
||||
"/sys/class/gpio/gpio%d/direction", pin_nr);
|
||||
if (pin_dir_path_len <= 0) {
|
||||
return -1;
|
||||
}
|
||||
const char *value = output ? "out" : "in";
|
||||
return util::write_file(pin_dir_path, (void*)value, strlen(value));
|
||||
}
|
||||
|
||||
int gpio_set(int pin_nr, bool high) {
|
||||
char pin_val_path[50];
|
||||
int pin_val_path_len = snprintf(pin_val_path, sizeof(pin_val_path),
|
||||
"/sys/class/gpio/gpio%d/value", pin_nr);
|
||||
if (pin_val_path_len <= 0) {
|
||||
return -1;
|
||||
}
|
||||
return util::write_file(pin_val_path, (void*)(high ? "1" : "0"), 1);
|
||||
}
|
||||
|
||||
int gpiochip_get_ro_value_fd(const char* consumer_label, int gpiochiop_id, int pin_nr) {
|
||||
|
||||
// Assumed that all interrupt pins are unexported and rights are given to
|
||||
// read from gpiochip0.
|
||||
std::string gpiochip_path = "/dev/gpiochip" + std::to_string(gpiochiop_id);
|
||||
int fd = open(gpiochip_path.c_str(), O_RDONLY);
|
||||
if (fd < 0) {
|
||||
LOGE("Error opening gpiochip0 fd");
|
||||
return -1;
|
||||
}
|
||||
|
||||
// Setup event
|
||||
struct gpioevent_request rq;
|
||||
rq.lineoffset = pin_nr;
|
||||
rq.handleflags = GPIOHANDLE_REQUEST_INPUT;
|
||||
|
||||
/* Requesting both edges as the data ready pulse from the lsm6ds sensor is
|
||||
very short(75us) and is mostly detected as falling edge instead of rising.
|
||||
So if it is detected as rising the following falling edge is skipped. */
|
||||
rq.eventflags = GPIOEVENT_REQUEST_BOTH_EDGES;
|
||||
|
||||
strncpy(rq.consumer_label, consumer_label, std::size(rq.consumer_label) - 1);
|
||||
int ret = util::safe_ioctl(fd, GPIO_GET_LINEEVENT_IOCTL, &rq);
|
||||
if (ret == -1) {
|
||||
LOGE("Unable to get line event from ioctl : %s", strerror(errno));
|
||||
close(fd);
|
||||
return -1;
|
||||
}
|
||||
|
||||
close(fd);
|
||||
return rq.fd;
|
||||
}
|
||||
|
||||
#endif
|
||||
33
common/gpio.h
Normal file
33
common/gpio.h
Normal file
@@ -0,0 +1,33 @@
|
||||
#pragma once
|
||||
|
||||
// Pin definitions
|
||||
#ifdef QCOM2
|
||||
#define GPIO_HUB_RST_N 30
|
||||
#define GPIO_UBLOX_RST_N 32
|
||||
#define GPIO_UBLOX_SAFEBOOT_N 33
|
||||
#define GPIO_GNSS_PWR_EN 34 /* SCHEMATIC LABEL: GPIO_UBLOX_PWR_EN */
|
||||
#define GPIO_STM_RST_N 124
|
||||
#define GPIO_STM_BOOT0 134
|
||||
#define GPIO_BMX_ACCEL_INT 21
|
||||
#define GPIO_BMX_GYRO_INT 23
|
||||
#define GPIO_BMX_MAGN_INT 87
|
||||
#define GPIO_LSM_INT 84
|
||||
#define GPIOCHIP_INT 0
|
||||
#else
|
||||
#define GPIO_HUB_RST_N 0
|
||||
#define GPIO_UBLOX_RST_N 0
|
||||
#define GPIO_UBLOX_SAFEBOOT_N 0
|
||||
#define GPIO_GNSS_PWR_EN 0 /* SCHEMATIC LABEL: GPIO_UBLOX_PWR_EN */
|
||||
#define GPIO_STM_RST_N 0
|
||||
#define GPIO_STM_BOOT0 0
|
||||
#define GPIO_BMX_ACCEL_INT 0
|
||||
#define GPIO_BMX_GYRO_INT 0
|
||||
#define GPIO_BMX_MAGN_INT 0
|
||||
#define GPIO_LSM_INT 0
|
||||
#define GPIOCHIP_INT 0
|
||||
#endif
|
||||
|
||||
int gpio_init(int pin_nr, bool output);
|
||||
int gpio_set(int pin_nr, bool high);
|
||||
|
||||
int gpiochip_get_ro_value_fd(const char* consumer_label, int gpiochiop_id, int pin_nr);
|
||||
@@ -1,6 +1,5 @@
|
||||
import os
|
||||
from functools import lru_cache
|
||||
from typing import Optional, List
|
||||
|
||||
def gpio_init(pin: int, output: bool) -> None:
|
||||
try:
|
||||
@@ -16,7 +15,7 @@ def gpio_set(pin: int, high: bool) -> None:
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
def gpio_read(pin: int) -> Optional[bool]:
|
||||
def gpio_read(pin: int) -> bool | None:
|
||||
val = None
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'rb') as f:
|
||||
@@ -37,7 +36,7 @@ def gpio_export(pin: int) -> None:
|
||||
print(f"Failed to export gpio {pin}")
|
||||
|
||||
@lru_cache(maxsize=None)
|
||||
def get_irq_action(irq: int) -> List[str]:
|
||||
def get_irq_action(irq: int) -> list[str]:
|
||||
try:
|
||||
with open(f"/sys/kernel/irq/{irq}/actions") as f:
|
||||
actions = f.read().strip().split(',')
|
||||
@@ -45,7 +44,7 @@ def get_irq_action(irq: int) -> List[str]:
|
||||
except FileNotFoundError:
|
||||
return []
|
||||
|
||||
def get_irqs_for_action(action: str) -> List[str]:
|
||||
def get_irqs_for_action(action: str) -> list[str]:
|
||||
ret = []
|
||||
with open("/proc/interrupts") as f:
|
||||
for l in f.readlines():
|
||||
|
||||
92
common/i2c.cc
Normal file
92
common/i2c.cc
Normal file
@@ -0,0 +1,92 @@
|
||||
#include "common/i2c.h"
|
||||
|
||||
#include <fcntl.h>
|
||||
#include <sys/ioctl.h>
|
||||
#include <unistd.h>
|
||||
|
||||
#include <cassert>
|
||||
#include <cstdio>
|
||||
#include <stdexcept>
|
||||
|
||||
#include "common/swaglog.h"
|
||||
#include "common/util.h"
|
||||
|
||||
#define UNUSED(x) (void)(x)
|
||||
|
||||
#ifdef QCOM2
|
||||
// TODO: decide if we want to install libi2c-dev everywhere
|
||||
extern "C" {
|
||||
#include <linux/i2c-dev.h>
|
||||
#include <i2c/smbus.h>
|
||||
}
|
||||
|
||||
I2CBus::I2CBus(uint8_t bus_id) {
|
||||
char bus_name[20];
|
||||
snprintf(bus_name, 20, "/dev/i2c-%d", bus_id);
|
||||
|
||||
i2c_fd = HANDLE_EINTR(open(bus_name, O_RDWR));
|
||||
if (i2c_fd < 0) {
|
||||
throw std::runtime_error("Failed to open I2C bus");
|
||||
}
|
||||
}
|
||||
|
||||
I2CBus::~I2CBus() {
|
||||
if (i2c_fd >= 0) {
|
||||
close(i2c_fd);
|
||||
}
|
||||
}
|
||||
|
||||
int I2CBus::read_register(uint8_t device_address, uint register_address, uint8_t *buffer, uint8_t len) {
|
||||
std::lock_guard lk(m);
|
||||
|
||||
int ret = 0;
|
||||
|
||||
ret = HANDLE_EINTR(ioctl(i2c_fd, I2C_SLAVE, device_address));
|
||||
if (ret < 0) { goto fail; }
|
||||
|
||||
ret = i2c_smbus_read_i2c_block_data(i2c_fd, register_address, len, buffer);
|
||||
if ((ret < 0) || (ret != len)) { goto fail; }
|
||||
|
||||
fail:
|
||||
return ret;
|
||||
}
|
||||
|
||||
int I2CBus::set_register(uint8_t device_address, uint register_address, uint8_t data) {
|
||||
std::lock_guard lk(m);
|
||||
|
||||
int ret = 0;
|
||||
|
||||
ret = HANDLE_EINTR(ioctl(i2c_fd, I2C_SLAVE, device_address));
|
||||
if (ret < 0) { goto fail; }
|
||||
|
||||
ret = i2c_smbus_write_byte_data(i2c_fd, register_address, data);
|
||||
if (ret < 0) { goto fail; }
|
||||
|
||||
fail:
|
||||
return ret;
|
||||
}
|
||||
|
||||
#else
|
||||
|
||||
I2CBus::I2CBus(uint8_t bus_id) {
|
||||
UNUSED(bus_id);
|
||||
i2c_fd = -1;
|
||||
}
|
||||
|
||||
I2CBus::~I2CBus() {}
|
||||
|
||||
int I2CBus::read_register(uint8_t device_address, uint register_address, uint8_t *buffer, uint8_t len) {
|
||||
UNUSED(device_address);
|
||||
UNUSED(register_address);
|
||||
UNUSED(buffer);
|
||||
UNUSED(len);
|
||||
return -1;
|
||||
}
|
||||
|
||||
int I2CBus::set_register(uint8_t device_address, uint register_address, uint8_t data) {
|
||||
UNUSED(device_address);
|
||||
UNUSED(register_address);
|
||||
UNUSED(data);
|
||||
return -1;
|
||||
}
|
||||
#endif
|
||||
19
common/i2c.h
Normal file
19
common/i2c.h
Normal file
@@ -0,0 +1,19 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <mutex>
|
||||
|
||||
#include <sys/types.h>
|
||||
|
||||
class I2CBus {
|
||||
private:
|
||||
int i2c_fd;
|
||||
std::mutex m;
|
||||
|
||||
public:
|
||||
I2CBus(uint8_t bus_id);
|
||||
~I2CBus();
|
||||
|
||||
int read_register(uint8_t device_address, uint register_address, uint8_t *buffer, uint8_t len);
|
||||
int set_register(uint8_t device_address, uint register_address, uint8_t data);
|
||||
};
|
||||
85
common/mat.h
Normal file
85
common/mat.h
Normal file
@@ -0,0 +1,85 @@
|
||||
#pragma once
|
||||
|
||||
typedef struct vec3 {
|
||||
float v[3];
|
||||
} vec3;
|
||||
|
||||
typedef struct vec4 {
|
||||
float v[4];
|
||||
} vec4;
|
||||
|
||||
typedef struct mat3 {
|
||||
float v[3*3];
|
||||
} mat3;
|
||||
|
||||
typedef struct mat4 {
|
||||
float v[4*4];
|
||||
} mat4;
|
||||
|
||||
static inline mat3 matmul3(const mat3 &a, const mat3 &b) {
|
||||
mat3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<3; k++) {
|
||||
v += a.v[r*3+k] * b.v[k*3+c];
|
||||
}
|
||||
ret.v[r*3+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec3 matvecmul3(const mat3 &a, const vec3 &b) {
|
||||
vec3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
ret.v[r] += a.v[r*3+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline mat4 matmul(const mat4 &a, const mat4 &b) {
|
||||
mat4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<4; k++) {
|
||||
v += a.v[r*4+k] * b.v[k*4+c];
|
||||
}
|
||||
ret.v[r*4+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec4 matvecmul(const mat4 &a, const vec4 &b) {
|
||||
vec4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
ret.v[r] += a.v[r*4+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
// scales the input and output space of a transformation matrix
|
||||
// that assumes pixel-center origin.
|
||||
static inline mat3 transform_scale_buffer(const mat3 &in, float s) {
|
||||
// in_pt = ( transform(out_pt/s + 0.5) - 0.5) * s
|
||||
|
||||
mat3 transform_out = {{
|
||||
1.0f/s, 0.0f, 0.5f,
|
||||
0.0f, 1.0f/s, 0.5f,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
mat3 transform_in = {{
|
||||
s, 0.0f, -0.5f*s,
|
||||
0.0f, s, -0.5f*s,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
return matmul3(transform_in, matmul3(in, transform_out));
|
||||
}
|
||||
50
common/mock/__init__.py
Normal file
50
common/mock/__init__.py
Normal file
@@ -0,0 +1,50 @@
|
||||
"""
|
||||
Utilities for generating mock messages for testing.
|
||||
example in common/tests/test_mock.py
|
||||
"""
|
||||
|
||||
|
||||
import functools
|
||||
import threading
|
||||
from cereal.messaging import PubMaster
|
||||
from cereal.services import SERVICE_LIST
|
||||
from openpilot.common.mock.generators import generate_liveLocationKalman
|
||||
from openpilot.common.realtime import Ratekeeper
|
||||
|
||||
|
||||
MOCK_GENERATOR = {
|
||||
"liveLocationKalman": generate_liveLocationKalman
|
||||
}
|
||||
|
||||
|
||||
def generate_messages_loop(services: list[str], done: threading.Event):
|
||||
pm = PubMaster(services)
|
||||
rk = Ratekeeper(100)
|
||||
i = 0
|
||||
while not done.is_set():
|
||||
for s in services:
|
||||
should_send = i % (100/SERVICE_LIST[s].frequency) == 0
|
||||
if should_send:
|
||||
message = MOCK_GENERATOR[s]()
|
||||
pm.send(s, message)
|
||||
i += 1
|
||||
rk.keep_time()
|
||||
|
||||
|
||||
def mock_messages(services: list[str] | str):
|
||||
if isinstance(services, str):
|
||||
services = [services]
|
||||
|
||||
def decorator(func):
|
||||
@functools.wraps(func)
|
||||
def wrapper(*args, **kwargs):
|
||||
done = threading.Event()
|
||||
t = threading.Thread(target=generate_messages_loop, args=(services, done))
|
||||
t.start()
|
||||
try:
|
||||
return func(*args, **kwargs)
|
||||
finally:
|
||||
done.set()
|
||||
t.join()
|
||||
return wrapper
|
||||
return decorator
|
||||
20
common/mock/generators.py
Normal file
20
common/mock/generators.py
Normal file
@@ -0,0 +1,20 @@
|
||||
from cereal import messaging
|
||||
|
||||
|
||||
LOCATION1 = (32.7174, -117.16277)
|
||||
LOCATION2 = (32.7558, -117.2037)
|
||||
|
||||
LLK_DECIMATION = 10
|
||||
RENDER_FRAMES = 15
|
||||
DEFAULT_ITERATIONS = RENDER_FRAMES * LLK_DECIMATION
|
||||
|
||||
|
||||
def generate_liveLocationKalman(location=LOCATION1):
|
||||
msg = messaging.new_message('liveLocationKalman')
|
||||
msg.liveLocationKalman.positionGeodetic = {'value': [*location, 0], 'std': [0., 0., 0.], 'valid': True}
|
||||
msg.liveLocationKalman.positionECEF = {'value': [0., 0., 0.], 'std': [0., 0., 0.], 'valid': True}
|
||||
msg.liveLocationKalman.calibratedOrientationNED = {'value': [0., 0., 0.], 'std': [0., 0., 0.], 'valid': True}
|
||||
msg.liveLocationKalman.velocityCalibrated = {'value': [0., 0., 0.], 'std': [0., 0., 0.], 'valid': True}
|
||||
msg.liveLocationKalman.status = 'valid'
|
||||
msg.liveLocationKalman.gpsOK = True
|
||||
return msg
|
||||
607
common/params.cc
Normal file
607
common/params.cc
Normal file
@@ -0,0 +1,607 @@
|
||||
#include "common/params.h"
|
||||
|
||||
#include <dirent.h>
|
||||
#include <sys/file.h>
|
||||
|
||||
#include <algorithm>
|
||||
#include <cassert>
|
||||
#include <csignal>
|
||||
#include <unordered_map>
|
||||
|
||||
#include "common/queue.h"
|
||||
#include "common/swaglog.h"
|
||||
#include "common/util.h"
|
||||
#include "system/hardware/hw.h"
|
||||
|
||||
namespace {
|
||||
|
||||
volatile sig_atomic_t params_do_exit = 0;
|
||||
void params_sig_handler(int signal) {
|
||||
params_do_exit = 1;
|
||||
}
|
||||
|
||||
int fsync_dir(const std::string &path) {
|
||||
int result = -1;
|
||||
int fd = HANDLE_EINTR(open(path.c_str(), O_RDONLY, 0755));
|
||||
if (fd >= 0) {
|
||||
result = fsync(fd);
|
||||
close(fd);
|
||||
}
|
||||
return result;
|
||||
}
|
||||
|
||||
bool create_params_path(const std::string ¶m_path, const std::string &key_path) {
|
||||
// Make sure params path exists
|
||||
if (!util::file_exists(param_path) && !util::create_directories(param_path, 0775)) {
|
||||
return false;
|
||||
}
|
||||
|
||||
// See if the symlink exists, otherwise create it
|
||||
if (!util::file_exists(key_path)) {
|
||||
// 1) Create temp folder
|
||||
// 2) Symlink it to temp link
|
||||
// 3) Move symlink to <params>/d
|
||||
|
||||
std::string tmp_path = param_path + "/.tmp_XXXXXX";
|
||||
// this should be OK since mkdtemp just replaces characters in place
|
||||
char *tmp_dir = mkdtemp((char *)tmp_path.c_str());
|
||||
if (tmp_dir == NULL) {
|
||||
return false;
|
||||
}
|
||||
|
||||
std::string link_path = std::string(tmp_dir) + ".link";
|
||||
if (symlink(tmp_dir, link_path.c_str()) != 0) {
|
||||
return false;
|
||||
}
|
||||
|
||||
// don't return false if it has been created by other
|
||||
if (rename(link_path.c_str(), key_path.c_str()) != 0 && errno != EEXIST) {
|
||||
return false;
|
||||
}
|
||||
}
|
||||
|
||||
return true;
|
||||
}
|
||||
|
||||
std::string ensure_params_path(const std::string &prefix, const std::string &path = {}) {
|
||||
std::string params_path = path.empty() ? Path::params() : path;
|
||||
if (!create_params_path(params_path, params_path + prefix)) {
|
||||
throw std::runtime_error(util::string_format(
|
||||
"Failed to ensure params path, errno=%d, path=%s, param_prefix=%s",
|
||||
errno, params_path.c_str(), prefix.c_str()));
|
||||
}
|
||||
return params_path;
|
||||
}
|
||||
|
||||
class FileLock {
|
||||
public:
|
||||
FileLock(const std::string &fn) {
|
||||
fd_ = HANDLE_EINTR(open(fn.c_str(), O_CREAT, 0775));
|
||||
if (fd_ < 0 || HANDLE_EINTR(flock(fd_, LOCK_EX)) < 0) {
|
||||
LOGE("Failed to lock file %s, errno=%d", fn.c_str(), errno);
|
||||
}
|
||||
}
|
||||
~FileLock() { close(fd_); }
|
||||
|
||||
private:
|
||||
int fd_ = -1;
|
||||
};
|
||||
|
||||
std::unordered_map<std::string, uint32_t> keys = {
|
||||
{"AccessToken", CLEAR_ON_MANAGER_START | DONT_LOG},
|
||||
{"ApiCache_Device", PERSISTENT},
|
||||
{"ApiCache_NavDestinations", PERSISTENT},
|
||||
{"AssistNowToken", PERSISTENT},
|
||||
{"AthenadPid", PERSISTENT},
|
||||
{"AthenadUploadQueue", PERSISTENT},
|
||||
{"AthenadRecentlyViewedRoutes", PERSISTENT},
|
||||
{"BootCount", PERSISTENT},
|
||||
{"CalibrationParams", PERSISTENT},
|
||||
{"CameraDebugExpGain", CLEAR_ON_MANAGER_START},
|
||||
{"CameraDebugExpTime", CLEAR_ON_MANAGER_START},
|
||||
{"CarBatteryCapacity", PERSISTENT},
|
||||
{"CarParams", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"CarParamsCache", CLEAR_ON_MANAGER_START},
|
||||
{"CarParamsPersistent", PERSISTENT},
|
||||
{"CarParamsPrevRoute", PERSISTENT},
|
||||
{"CarVin", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"CompletedTrainingVersion", PERSISTENT},
|
||||
{"ControlsReady", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"CurrentBootlog", PERSISTENT},
|
||||
{"CurrentRoute", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"DisableLogging", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"DisablePowerDown", PERSISTENT},
|
||||
{"DisableUpdates", PERSISTENT},
|
||||
{"DisengageOnAccelerator", PERSISTENT},
|
||||
{"DmModelInitialized", CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"DongleId", PERSISTENT},
|
||||
{"DoReboot", CLEAR_ON_MANAGER_START},
|
||||
{"DoShutdown", CLEAR_ON_MANAGER_START},
|
||||
{"DoUninstall", CLEAR_ON_MANAGER_START},
|
||||
{"ExperimentalLongitudinalEnabled", PERSISTENT | DEVELOPMENT_ONLY},
|
||||
{"ExperimentalMode", PERSISTENT},
|
||||
{"ExperimentalModeConfirmed", PERSISTENT},
|
||||
{"FirmwareQueryDone", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"ForcePowerDown", PERSISTENT},
|
||||
{"GitBranch", PERSISTENT},
|
||||
{"GitCommit", PERSISTENT},
|
||||
{"GitCommitDate", PERSISTENT},
|
||||
{"GitDiff", PERSISTENT},
|
||||
{"GithubSshKeys", PERSISTENT},
|
||||
{"GithubUsername", PERSISTENT},
|
||||
{"GitRemote", PERSISTENT},
|
||||
{"GsmApn", PERSISTENT},
|
||||
{"GsmMetered", PERSISTENT},
|
||||
{"GsmRoaming", PERSISTENT},
|
||||
{"HardwareSerial", PERSISTENT},
|
||||
{"HasAcceptedTerms", PERSISTENT},
|
||||
{"IMEI", PERSISTENT},
|
||||
{"InstallDate", PERSISTENT},
|
||||
{"IsDriverViewEnabled", CLEAR_ON_MANAGER_START},
|
||||
{"IsEngaged", PERSISTENT},
|
||||
{"IsLdwEnabled", PERSISTENT},
|
||||
{"IsMetric", PERSISTENT},
|
||||
{"IsOffroad", CLEAR_ON_MANAGER_START},
|
||||
{"IsOnroad", PERSISTENT},
|
||||
{"IsRhdDetected", PERSISTENT},
|
||||
{"IsReleaseBranch", CLEAR_ON_MANAGER_START},
|
||||
{"IsTakingSnapshot", CLEAR_ON_MANAGER_START},
|
||||
{"IsTestedBranch", CLEAR_ON_MANAGER_START},
|
||||
{"JoystickDebugMode", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"LanguageSetting", PERSISTENT},
|
||||
{"LastAthenaPingTime", CLEAR_ON_MANAGER_START},
|
||||
{"LastGPSPosition", PERSISTENT},
|
||||
{"LastManagerExitReason", CLEAR_ON_MANAGER_START},
|
||||
{"LastOffroadStatusPacket", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"LastPowerDropDetected", CLEAR_ON_MANAGER_START},
|
||||
{"LastUpdateException", CLEAR_ON_MANAGER_START},
|
||||
{"LastUpdateTime", PERSISTENT},
|
||||
{"LiveParameters", PERSISTENT},
|
||||
{"LiveTorqueParameters", PERSISTENT | DONT_LOG},
|
||||
{"LongitudinalPersonality", PERSISTENT},
|
||||
{"NavDestination", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"NavDestinationWaypoints", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"NavPastDestinations", PERSISTENT},
|
||||
{"NavSettingLeftSide", PERSISTENT},
|
||||
{"NavSettingTime24h", PERSISTENT},
|
||||
{"NetworkMetered", PERSISTENT},
|
||||
{"ObdMultiplexingChanged", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"ObdMultiplexingEnabled", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_BadNvme", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_CarUnrecognized", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_ConnectivityNeeded", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_ConnectivityNeededPrompt", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_InvalidTime", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_IsTakingSnapshot", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_NeosUpdate", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_NoFirmware", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_Recalibration", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"Offroad_StorageMissing", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_TemperatureTooHigh", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_UnofficialHardware", CLEAR_ON_MANAGER_START},
|
||||
{"Offroad_UpdateFailed", CLEAR_ON_MANAGER_START},
|
||||
{"OpenpilotEnabledToggle", PERSISTENT},
|
||||
{"PandaHeartbeatLost", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"PandaSomResetTriggered", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"PandaSignatures", CLEAR_ON_MANAGER_START},
|
||||
{"PrimeType", PERSISTENT},
|
||||
{"RecordFront", PERSISTENT},
|
||||
{"RecordFrontLock", PERSISTENT}, // for the internal fleet
|
||||
{"ReplayControlsState", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"RouteCount", PERSISTENT},
|
||||
{"SnoozeUpdate", CLEAR_ON_MANAGER_START | CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"SshEnabled", PERSISTENT},
|
||||
{"TermsVersion", PERSISTENT},
|
||||
{"Timezone", PERSISTENT},
|
||||
{"TrainingVersion", PERSISTENT},
|
||||
{"UbloxAvailable", PERSISTENT},
|
||||
{"UpdateAvailable", CLEAR_ON_MANAGER_START | CLEAR_ON_ONROAD_TRANSITION},
|
||||
{"UpdateFailedCount", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterAvailableBranches", PERSISTENT},
|
||||
{"UpdaterCurrentDescription", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterCurrentReleaseNotes", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterFetchAvailable", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterNewDescription", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterNewReleaseNotes", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterState", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterTargetBranch", CLEAR_ON_MANAGER_START},
|
||||
{"UpdaterLastFetchTime", PERSISTENT},
|
||||
{"Version", PERSISTENT},
|
||||
|
||||
// FrogPilot parameters
|
||||
{"AccelerationPath", PERSISTENT},
|
||||
{"AccelerationProfile", PERSISTENT},
|
||||
{"AdjacentPath", PERSISTENT},
|
||||
{"AdjacentPathMetrics", PERSISTENT},
|
||||
{"AggressiveAcceleration", PERSISTENT},
|
||||
{"AggressiveFollow", PERSISTENT},
|
||||
{"AggressiveJerk", PERSISTENT},
|
||||
{"AlertVolumeControl", PERSISTENT},
|
||||
{"AlwaysOnLateral", PERSISTENT},
|
||||
{"AlwaysOnLateralMain", PERSISTENT},
|
||||
{"AMapKey1", PERSISTENT},
|
||||
{"AMapKey2", PERSISTENT},
|
||||
{"ApiCache_DriveStats", PERSISTENT},
|
||||
{"AutomaticUpdates", PERSISTENT},
|
||||
{"AvailableModels", PERSISTENT},
|
||||
{"AvailableModelsNames", PERSISTENT},
|
||||
{"BigMap", PERSISTENT},
|
||||
{"BlindSpotPath", PERSISTENT},
|
||||
{"CameraFPS", PERSISTENT},
|
||||
{"CameraView", PERSISTENT},
|
||||
{"CarMake", PERSISTENT},
|
||||
{"CarModel", PERSISTENT},
|
||||
{"CarSpeedLimit", PERSISTENT},
|
||||
{"CECurves", PERSISTENT},
|
||||
{"CECurvesLead", PERSISTENT},
|
||||
{"CENavigation", PERSISTENT},
|
||||
{"CENavigationIntersections", PERSISTENT},
|
||||
{"CENavigationLead", PERSISTENT},
|
||||
{"CENavigationTurns", PERSISTENT},
|
||||
{"CESignal", PERSISTENT},
|
||||
{"CESlowerLead", PERSISTENT},
|
||||
{"CESpeed", PERSISTENT},
|
||||
{"CESpeedLead", PERSISTENT},
|
||||
{"CEStatus", PERSISTENT},
|
||||
{"CEStopLights", PERSISTENT},
|
||||
{"CEStopLightsLead", PERSISTENT},
|
||||
{"Compass", PERSISTENT},
|
||||
{"ConditionalExperimental", PERSISTENT},
|
||||
{"CrosstrekTorque", PERSISTENT},
|
||||
{"CurrentHolidayTheme", PERSISTENT},
|
||||
{"CurrentRandomEvent", PERSISTENT},
|
||||
{"CurveSensitivity", PERSISTENT},
|
||||
{"CustomAlerts", PERSISTENT},
|
||||
{"CustomColors", PERSISTENT},
|
||||
{"CustomCruise", PERSISTENT},
|
||||
{"CustomCruiseLong", PERSISTENT},
|
||||
{"CustomIcons", PERSISTENT},
|
||||
{"CustomPaths", PERSISTENT},
|
||||
{"CustomPersonalities", PERSISTENT},
|
||||
{"CustomUI", PERSISTENT},
|
||||
{"CustomSignals", PERSISTENT},
|
||||
{"CustomSounds", PERSISTENT},
|
||||
{"CustomTheme", PERSISTENT},
|
||||
{"CydiaTune", PERSISTENT},
|
||||
{"DecelerationProfile", PERSISTENT},
|
||||
{"DeveloperUI", PERSISTENT},
|
||||
{"DeviceManagement", PERSISTENT},
|
||||
{"DeviceShutdown", PERSISTENT},
|
||||
{"DisableMTSCSmoothing", PERSISTENT},
|
||||
{"DisableOnroadUploads", PERSISTENT},
|
||||
{"DisableOpenpilotLongitudinal", PERSISTENT},
|
||||
{"DisableVTSCSmoothing", PERSISTENT},
|
||||
{"DisengageVolume", PERSISTENT},
|
||||
{"DistanceLongPressed", PERSISTENT},
|
||||
{"DoSoftReboot", CLEAR_ON_MANAGER_START},
|
||||
{"DragonPilotTune", PERSISTENT},
|
||||
{"DriverCamera", PERSISTENT},
|
||||
{"DynamicPathWidth", PERSISTENT},
|
||||
{"EngageVolume", PERSISTENT},
|
||||
{"EVTable", PERSISTENT},
|
||||
{"ExperimentalModeActivation", PERSISTENT},
|
||||
{"ExperimentalModeViaDistance", PERSISTENT},
|
||||
{"ExperimentalModeViaLKAS", PERSISTENT},
|
||||
{"ExperimentalModeViaTap", PERSISTENT},
|
||||
{"Fahrenheit", PERSISTENT},
|
||||
{"FingerprintLogged", CLEAR_ON_MANAGER_START},
|
||||
{"ForceAutoTune", PERSISTENT},
|
||||
{"ForceFingerprint", PERSISTENT},
|
||||
{"ForceMPHDashboard", PERSISTENT},
|
||||
{"FPSCounter", PERSISTENT},
|
||||
{"FrogPilotDrives", PERSISTENT},
|
||||
{"FrogPilotKilometers", PERSISTENT},
|
||||
{"FrogPilotMinutes", PERSISTENT},
|
||||
{"FrogPilotTogglesUpdated", PERSISTENT},
|
||||
{"FrogsGoMoo", PERSISTENT},
|
||||
{"FrogsGoMooTune", PERSISTENT},
|
||||
{"FullMap", PERSISTENT},
|
||||
{"GasRegenCmd", PERSISTENT},
|
||||
{"GMapKey", PERSISTENT},
|
||||
{"GoatScream", PERSISTENT},
|
||||
{"GreenLightAlert", PERSISTENT},
|
||||
{"HideAlerts", PERSISTENT},
|
||||
{"HideAOLStatusBar", PERSISTENT},
|
||||
{"HideCEMStatusBar", PERSISTENT},
|
||||
{"HideDisableOpenpilotLongitudinal", PERSISTENT},
|
||||
{"HideLeadMarker", PERSISTENT},
|
||||
{"HideMapIcon", PERSISTENT},
|
||||
{"HideMaxSpeed", PERSISTENT},
|
||||
{"HideSpeed", PERSISTENT},
|
||||
{"HideSpeedUI", PERSISTENT},
|
||||
{"HideUIElements", PERSISTENT},
|
||||
{"HigherBitrate", PERSISTENT},
|
||||
{"HolidayThemes", PERSISTENT},
|
||||
{"IncreaseThermalLimits", PERSISTENT},
|
||||
{"KaofuiIcons", PERSISTENT},
|
||||
{"kiV1", PERSISTENT},
|
||||
{"kiV2", PERSISTENT},
|
||||
{"kiV3", PERSISTENT},
|
||||
{"kiV4", PERSISTENT},
|
||||
{"kpV1", PERSISTENT},
|
||||
{"kpV2", PERSISTENT},
|
||||
{"kpV3", PERSISTENT},
|
||||
{"kpV4", PERSISTENT},
|
||||
{"LaneChangeTime", PERSISTENT},
|
||||
{"LaneDetectionWidth", PERSISTENT},
|
||||
{"LaneLinesWidth", PERSISTENT},
|
||||
{"LastMapsUpdate", PERSISTENT},
|
||||
{"LateralTune", PERSISTENT},
|
||||
{"LeadDepartingAlert", PERSISTENT},
|
||||
{"LeadDetectionThreshold", PERSISTENT},
|
||||
{"LeadInfo", PERSISTENT},
|
||||
{"LockDoors", PERSISTENT},
|
||||
{"LongitudinalTune", PERSISTENT},
|
||||
{"LongPitch", PERSISTENT},
|
||||
{"LoudBlindspotAlert", PERSISTENT},
|
||||
{"LowVoltageShutdown", PERSISTENT},
|
||||
{"ManualUpdateInitiated", PERSISTENT},
|
||||
{"MapboxPublicKey", PERSISTENT},
|
||||
{"MapboxSecretKey", PERSISTENT},
|
||||
{"MapsSelected", PERSISTENT},
|
||||
{"MapSpeedLimit", PERSISTENT},
|
||||
{"MapStyle", PERSISTENT},
|
||||
{"MapTargetLatA", PERSISTENT},
|
||||
{"MapTargetVelocities", PERSISTENT},
|
||||
{"Model", PERSISTENT},
|
||||
{"ModelDownloadProgress", PERSISTENT},
|
||||
{"ModelName", PERSISTENT},
|
||||
{"ModelSelector", PERSISTENT},
|
||||
{"ModelToDownload", PERSISTENT},
|
||||
{"ModelUI", PERSISTENT},
|
||||
{"MTSCAggressiveness", PERSISTENT},
|
||||
{"MTSCCurvatureCheck", PERSISTENT},
|
||||
{"MTSCEnabled", PERSISTENT},
|
||||
{"NavSpeedLimit", PERSISTENT},
|
||||
{"NNFF", PERSISTENT},
|
||||
{"NNFFLite", PERSISTENT},
|
||||
{"NNFFModelName", PERSISTENT},
|
||||
{"NoLogging", PERSISTENT},
|
||||
{"NoUploads", PERSISTENT},
|
||||
{"NudgelessLaneChange", PERSISTENT},
|
||||
{"NumericalTemp", PERSISTENT},
|
||||
{"OfflineMode", PERSISTENT},
|
||||
{"Offset1", PERSISTENT},
|
||||
{"Offset2", PERSISTENT},
|
||||
{"Offset3", PERSISTENT},
|
||||
{"Offset4", PERSISTENT},
|
||||
{"OneLaneChange", PERSISTENT},
|
||||
{"OnroadDistanceButton", PERSISTENT},
|
||||
{"OnroadDistanceButtonPressed", PERSISTENT},
|
||||
{"OSMDownloadBounds", PERSISTENT},
|
||||
{"OSMDownloadLocations", PERSISTENT},
|
||||
{"OSMDownloadProgress", CLEAR_ON_MANAGER_START},
|
||||
{"PathEdgeWidth", PERSISTENT},
|
||||
{"PathWidth", PERSISTENT},
|
||||
{"PauseAOLOnBrake", PERSISTENT},
|
||||
{"PauseLateralOnSignal", PERSISTENT},
|
||||
{"PauseLateralSpeed", PERSISTENT},
|
||||
{"PedalsOnUI", PERSISTENT},
|
||||
{"PreferredSchedule", PERSISTENT},
|
||||
{"PreviousSpeedLimit", PERSISTENT},
|
||||
{"PromptDistractedVolume", PERSISTENT},
|
||||
{"PromptVolume", PERSISTENT},
|
||||
{"QOLControls", PERSISTENT},
|
||||
{"QOLVisuals", PERSISTENT},
|
||||
{"RandomEvents", PERSISTENT},
|
||||
{"RefuseVolume", PERSISTENT},
|
||||
{"RelaxedFollow", PERSISTENT},
|
||||
{"RelaxedJerk", PERSISTENT},
|
||||
{"ResetSteerRatio", PERSISTENT},
|
||||
{"ReverseCruise", PERSISTENT},
|
||||
{"ReverseCruiseUI", PERSISTENT},
|
||||
{"RoadEdgesWidth", PERSISTENT},
|
||||
{"RoadName", PERSISTENT},
|
||||
{"RoadNameUI", PERSISTENT},
|
||||
{"RotatingWheel", PERSISTENT},
|
||||
{"SchedulePending", PERSISTENT},
|
||||
{"ScreenBrightness", PERSISTENT},
|
||||
{"ScreenBrightnessOnroad", PERSISTENT},
|
||||
{"ScreenManagement", PERSISTENT},
|
||||
{"ScreenRecorder", PERSISTENT},
|
||||
{"ScreenTimeout", PERSISTENT},
|
||||
{"ScreenTimeoutOnroad", PERSISTENT},
|
||||
{"SearchInput", PERSISTENT},
|
||||
{"SetSpeedLimit", PERSISTENT},
|
||||
{"SetSpeedOffset", PERSISTENT},
|
||||
{"ShowCPU", PERSISTENT},
|
||||
{"ShowGPU", PERSISTENT},
|
||||
{"ShowIP", PERSISTENT},
|
||||
{"ShowJerk", PERSISTENT},
|
||||
{"ShowMemoryUsage", PERSISTENT},
|
||||
{"ShowSLCOffset", PERSISTENT},
|
||||
{"ShowSLCOffsetUI", PERSISTENT},
|
||||
{"ShowStorageLeft", PERSISTENT},
|
||||
{"ShowStorageUsed", PERSISTENT},
|
||||
{"ShowTuning", PERSISTENT},
|
||||
{"Sidebar", PERSISTENT},
|
||||
{"SLCConfirmation", PERSISTENT},
|
||||
{"SLCConfirmationLower", PERSISTENT},
|
||||
{"SLCConfirmationHigher", PERSISTENT},
|
||||
{"SLCConfirmed", PERSISTENT},
|
||||
{"SLCConfirmedPressed", PERSISTENT},
|
||||
{"SLCLookaheadHigher", PERSISTENT},
|
||||
{"SLCLookaheadLower", PERSISTENT},
|
||||
{"SLCFallback", PERSISTENT},
|
||||
{"SLCOverride", PERSISTENT},
|
||||
{"SLCPriority", PERSISTENT},
|
||||
{"SLCPriority1", PERSISTENT},
|
||||
{"SLCPriority2", PERSISTENT},
|
||||
{"SLCPriority3", PERSISTENT},
|
||||
{"SmoothBraking", PERSISTENT},
|
||||
{"SmoothBrakingFarLead", PERSISTENT},
|
||||
{"SmoothBrakingJerk", PERSISTENT},
|
||||
{"SNGHack", PERSISTENT},
|
||||
{"SpeedLimitController", PERSISTENT},
|
||||
{"SpeedLimitChangedAlert", PERSISTENT},
|
||||
{"StandardFollow", PERSISTENT},
|
||||
{"StandardJerk", PERSISTENT},
|
||||
{"StandbyMode", PERSISTENT},
|
||||
{"SteerRatio", PERSISTENT},
|
||||
{"SteerRatioStock", PERSISTENT},
|
||||
{"StockTune", PERSISTENT},
|
||||
{"StoppingDistance", PERSISTENT},
|
||||
{"TacoTune", PERSISTENT},
|
||||
{"TetheringEnabled", PERSISTENT},
|
||||
{"ToyotaDoors", PERSISTENT},
|
||||
{"TrafficFollow", PERSISTENT},
|
||||
{"TrafficJerk", PERSISTENT},
|
||||
{"TrafficMode", PERSISTENT},
|
||||
{"TrafficModeActive", CLEAR_ON_OFFROAD_TRANSITION},
|
||||
{"Tuning", PERSISTENT},
|
||||
{"TurnAggressiveness", PERSISTENT},
|
||||
{"TurnDesires", PERSISTENT},
|
||||
{"UnlimitedLength", PERSISTENT},
|
||||
{"UnlockDoors", PERSISTENT},
|
||||
{"Updated", PERSISTENT},
|
||||
{"UseSI", PERSISTENT},
|
||||
{"UseVienna", PERSISTENT},
|
||||
{"VisionTurnControl", PERSISTENT},
|
||||
{"WarningImmediateVolume", PERSISTENT},
|
||||
{"WarningSoftVolume", PERSISTENT},
|
||||
{"WheelIcon", PERSISTENT},
|
||||
{"WheelSpeed", PERSISTENT},
|
||||
};
|
||||
|
||||
} // namespace
|
||||
|
||||
|
||||
Params::Params(const std::string &path) {
|
||||
params_prefix = "/" + util::getenv("OPENPILOT_PREFIX", "d");
|
||||
params_path = ensure_params_path(params_prefix, path);
|
||||
}
|
||||
|
||||
Params::~Params() {
|
||||
if (future.valid()) {
|
||||
future.wait();
|
||||
}
|
||||
assert(queue.empty());
|
||||
}
|
||||
|
||||
std::vector<std::string> Params::allKeys() const {
|
||||
std::vector<std::string> ret;
|
||||
for (auto &p : keys) {
|
||||
ret.push_back(p.first);
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
bool Params::checkKey(const std::string &key) {
|
||||
return keys.find(key) != keys.end();
|
||||
}
|
||||
|
||||
ParamKeyType Params::getKeyType(const std::string &key) {
|
||||
return static_cast<ParamKeyType>(keys[key]);
|
||||
}
|
||||
|
||||
int Params::put(const char* key, const char* value, size_t value_size) {
|
||||
// Information about safely and atomically writing a file: https://lwn.net/Articles/457667/
|
||||
// 1) Create temp file
|
||||
// 2) Write data to temp file
|
||||
// 3) fsync() the temp file
|
||||
// 4) rename the temp file to the real name
|
||||
// 5) fsync() the containing directory
|
||||
std::string tmp_path = params_path + "/.tmp_value_XXXXXX";
|
||||
int tmp_fd = mkstemp((char*)tmp_path.c_str());
|
||||
if (tmp_fd < 0) return -1;
|
||||
|
||||
int result = -1;
|
||||
do {
|
||||
// Write value to temp.
|
||||
ssize_t bytes_written = HANDLE_EINTR(write(tmp_fd, value, value_size));
|
||||
if (bytes_written < 0 || (size_t)bytes_written != value_size) {
|
||||
result = -20;
|
||||
break;
|
||||
}
|
||||
|
||||
// fsync to force persist the changes.
|
||||
if ((result = fsync(tmp_fd)) < 0) break;
|
||||
|
||||
FileLock file_lock(params_path + "/.lock");
|
||||
|
||||
// Move temp into place.
|
||||
if ((result = rename(tmp_path.c_str(), getParamPath(key).c_str())) < 0) break;
|
||||
|
||||
// fsync parent directory
|
||||
result = fsync_dir(getParamPath());
|
||||
} while (false);
|
||||
|
||||
close(tmp_fd);
|
||||
::unlink(tmp_path.c_str());
|
||||
return result;
|
||||
}
|
||||
|
||||
int Params::remove(const std::string &key) {
|
||||
FileLock file_lock(params_path + "/.lock");
|
||||
int result = unlink(getParamPath(key).c_str());
|
||||
if (result != 0) {
|
||||
return result;
|
||||
}
|
||||
return fsync_dir(getParamPath());
|
||||
}
|
||||
|
||||
std::string Params::get(const std::string &key, bool block) {
|
||||
if (!block) {
|
||||
return util::read_file(getParamPath(key));
|
||||
} else {
|
||||
// blocking read until successful
|
||||
params_do_exit = 0;
|
||||
void (*prev_handler_sigint)(int) = std::signal(SIGINT, params_sig_handler);
|
||||
void (*prev_handler_sigterm)(int) = std::signal(SIGTERM, params_sig_handler);
|
||||
|
||||
std::string value;
|
||||
while (!params_do_exit) {
|
||||
if (value = util::read_file(getParamPath(key)); !value.empty()) {
|
||||
break;
|
||||
}
|
||||
util::sleep_for(100); // 0.1 s
|
||||
}
|
||||
|
||||
std::signal(SIGINT, prev_handler_sigint);
|
||||
std::signal(SIGTERM, prev_handler_sigterm);
|
||||
return value;
|
||||
}
|
||||
}
|
||||
|
||||
std::map<std::string, std::string> Params::readAll() {
|
||||
FileLock file_lock(params_path + "/.lock");
|
||||
return util::read_files_in_dir(getParamPath());
|
||||
}
|
||||
|
||||
void Params::clearAll(ParamKeyType key_type) {
|
||||
FileLock file_lock(params_path + "/.lock");
|
||||
|
||||
// 1) delete params of key_type
|
||||
// 2) delete files that are not defined in the keys.
|
||||
if (DIR *d = opendir(getParamPath().c_str())) {
|
||||
struct dirent *de = NULL;
|
||||
while ((de = readdir(d))) {
|
||||
if (de->d_type != DT_DIR) {
|
||||
auto it = keys.find(de->d_name);
|
||||
if (it == keys.end() || (it->second & key_type)) {
|
||||
unlink(getParamPath(de->d_name).c_str());
|
||||
}
|
||||
}
|
||||
}
|
||||
closedir(d);
|
||||
}
|
||||
|
||||
fsync_dir(getParamPath());
|
||||
}
|
||||
|
||||
void Params::putNonBlocking(const std::string &key, const std::string &val) {
|
||||
queue.push(std::make_pair(key, val));
|
||||
// start thread on demand
|
||||
if (!future.valid() || future.wait_for(std::chrono::milliseconds(0)) == std::future_status::ready) {
|
||||
future = std::async(std::launch::async, &Params::asyncWriteThread, this);
|
||||
}
|
||||
}
|
||||
|
||||
void Params::asyncWriteThread() {
|
||||
// TODO: write the latest one if a key has multiple values in the queue.
|
||||
std::pair<std::string, std::string> p;
|
||||
while (queue.try_pop(p, 0)) {
|
||||
// Params::put is Thread-Safe
|
||||
put(p.first, p.second);
|
||||
}
|
||||
}
|
||||
92
common/params.h
Normal file
92
common/params.h
Normal file
@@ -0,0 +1,92 @@
|
||||
#pragma once
|
||||
|
||||
#include <future>
|
||||
#include <map>
|
||||
#include <string>
|
||||
#include <tuple>
|
||||
#include <utility>
|
||||
#include <vector>
|
||||
|
||||
#include "common/queue.h"
|
||||
|
||||
enum ParamKeyType {
|
||||
PERSISTENT = 0x02,
|
||||
CLEAR_ON_MANAGER_START = 0x04,
|
||||
CLEAR_ON_ONROAD_TRANSITION = 0x08,
|
||||
CLEAR_ON_OFFROAD_TRANSITION = 0x10,
|
||||
DONT_LOG = 0x20,
|
||||
DEVELOPMENT_ONLY = 0x40,
|
||||
ALL = 0xFFFFFFFF
|
||||
};
|
||||
|
||||
class Params {
|
||||
public:
|
||||
explicit Params(const std::string &path = {});
|
||||
~Params();
|
||||
// Not copyable.
|
||||
Params(const Params&) = delete;
|
||||
Params& operator=(const Params&) = delete;
|
||||
|
||||
std::vector<std::string> allKeys() const;
|
||||
bool checkKey(const std::string &key);
|
||||
ParamKeyType getKeyType(const std::string &key);
|
||||
inline std::string getParamPath(const std::string &key = {}) {
|
||||
return params_path + params_prefix + (key.empty() ? "" : "/" + key);
|
||||
}
|
||||
|
||||
// Delete a value
|
||||
int remove(const std::string &key);
|
||||
void clearAll(ParamKeyType type);
|
||||
|
||||
// helpers for reading values
|
||||
std::string get(const std::string &key, bool block = false);
|
||||
inline bool getBool(const std::string &key, bool block = false) {
|
||||
return get(key, block) == "1";
|
||||
}
|
||||
inline int getInt(const std::string &key, bool block = false) {
|
||||
std::string value = get(key, block);
|
||||
return value.empty() ? 0 : std::stoi(value);
|
||||
}
|
||||
inline float getFloat(const std::string &key, bool block = false) {
|
||||
std::string value = get(key, block);
|
||||
return value.empty() ? 0.0 : std::stof(value);
|
||||
}
|
||||
std::map<std::string, std::string> readAll();
|
||||
|
||||
// helpers for writing values
|
||||
int put(const char *key, const char *val, size_t value_size);
|
||||
inline int put(const std::string &key, const std::string &val) {
|
||||
return put(key.c_str(), val.data(), val.size());
|
||||
}
|
||||
inline int putBool(const std::string &key, bool val) {
|
||||
return put(key.c_str(), val ? "1" : "0", 1);
|
||||
}
|
||||
inline int putInt(const std::string &key, int val) {
|
||||
return put(key.c_str(), std::to_string(val).c_str(), std::to_string(val).size());
|
||||
}
|
||||
inline int putFloat(const std::string &key, float val) {
|
||||
return put(key.c_str(), std::to_string(val).c_str(), std::to_string(val).size());
|
||||
}
|
||||
void putNonBlocking(const std::string &key, const std::string &val);
|
||||
inline void putBoolNonBlocking(const std::string &key, bool val) {
|
||||
putNonBlocking(key, val ? "1" : "0");
|
||||
}
|
||||
void putIntNonBlocking(const std::string &key, const std::string &val);
|
||||
inline void putIntNonBlocking(const std::string &key, int val) {
|
||||
putNonBlocking(key, std::to_string(val));
|
||||
}
|
||||
void putFloatNonBlocking(const std::string &key, const std::string &val);
|
||||
inline void putFloatNonBlocking(const std::string &key, float val) {
|
||||
putNonBlocking(key, std::to_string(val));
|
||||
}
|
||||
|
||||
private:
|
||||
void asyncWriteThread();
|
||||
|
||||
std::string params_path;
|
||||
std::string params_prefix;
|
||||
|
||||
// for nonblocking write
|
||||
std::future<void> future;
|
||||
SafeQueue<std::pair<std::string, std::string>> queue;
|
||||
};
|
||||
19684
common/params_pyx.cpp
19684
common/params_pyx.cpp
File diff suppressed because it is too large
Load Diff
Binary file not shown.
34
common/prefix.h
Normal file
34
common/prefix.h
Normal file
@@ -0,0 +1,34 @@
|
||||
#pragma once
|
||||
|
||||
#include <cassert>
|
||||
#include <string>
|
||||
|
||||
#include "common/params.h"
|
||||
#include "common/util.h"
|
||||
|
||||
class OpenpilotPrefix {
|
||||
public:
|
||||
OpenpilotPrefix(std::string prefix = {}) {
|
||||
if (prefix.empty()) {
|
||||
prefix = util::random_string(15);
|
||||
}
|
||||
msgq_path = "/dev/shm/" + prefix;
|
||||
bool ret = util::create_directories(msgq_path, 0777);
|
||||
assert(ret);
|
||||
setenv("OPENPILOT_PREFIX", prefix.c_str(), 1);
|
||||
}
|
||||
|
||||
~OpenpilotPrefix() {
|
||||
auto param_path = Params().getParamPath();
|
||||
if (util::file_exists(param_path)) {
|
||||
std::string real_path = util::readlink(param_path);
|
||||
system(util::string_format("rm %s -rf", real_path.c_str()).c_str());
|
||||
unlink(param_path.c_str());
|
||||
}
|
||||
system(util::string_format("rm %s -rf", msgq_path.c_str()).c_str());
|
||||
unsetenv("OPENPILOT_PREFIX");
|
||||
}
|
||||
|
||||
private:
|
||||
std::string msgq_path;
|
||||
};
|
||||
@@ -2,14 +2,13 @@ import os
|
||||
import shutil
|
||||
import uuid
|
||||
|
||||
from typing import Optional
|
||||
|
||||
from openpilot.common.params import Params
|
||||
from openpilot.system.hardware.hw import Paths
|
||||
from openpilot.system.hardware.hw import DEFAULT_DOWNLOAD_CACHE_ROOT
|
||||
|
||||
class OpenpilotPrefix:
|
||||
def __init__(self, prefix: Optional[str] = None, clean_dirs_on_exit: bool = True, shared_download_cache: bool = False):
|
||||
def __init__(self, prefix: str = None, clean_dirs_on_exit: bool = True, shared_download_cache: bool = False):
|
||||
self.prefix = prefix if prefix else str(uuid.uuid4().hex[0:15])
|
||||
self.msgq_path = os.path.join('/dev/shm', self.prefix)
|
||||
self.clean_dirs_on_exit = clean_dirs_on_exit
|
||||
|
||||
52
common/queue.h
Normal file
52
common/queue.h
Normal file
@@ -0,0 +1,52 @@
|
||||
#pragma once
|
||||
|
||||
#include <condition_variable>
|
||||
#include <mutex>
|
||||
#include <queue>
|
||||
|
||||
template <class T>
|
||||
class SafeQueue {
|
||||
public:
|
||||
SafeQueue() = default;
|
||||
|
||||
void push(const T& v) {
|
||||
{
|
||||
std::unique_lock lk(m);
|
||||
q.push(v);
|
||||
}
|
||||
cv.notify_one();
|
||||
}
|
||||
|
||||
T pop() {
|
||||
std::unique_lock lk(m);
|
||||
cv.wait(lk, [this] { return !q.empty(); });
|
||||
T v = q.front();
|
||||
q.pop();
|
||||
return v;
|
||||
}
|
||||
|
||||
bool try_pop(T& v, int timeout_ms = 0) {
|
||||
std::unique_lock lk(m);
|
||||
if (!cv.wait_for(lk, std::chrono::milliseconds(timeout_ms), [this] { return !q.empty(); })) {
|
||||
return false;
|
||||
}
|
||||
v = q.front();
|
||||
q.pop();
|
||||
return true;
|
||||
}
|
||||
|
||||
bool empty() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.empty();
|
||||
}
|
||||
|
||||
size_t size() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.size();
|
||||
}
|
||||
|
||||
private:
|
||||
mutable std::mutex m;
|
||||
std::condition_variable cv;
|
||||
std::queue<T> q;
|
||||
};
|
||||
40
common/ratekeeper.cc
Normal file
40
common/ratekeeper.cc
Normal file
@@ -0,0 +1,40 @@
|
||||
#include "common/ratekeeper.h"
|
||||
|
||||
#include <algorithm>
|
||||
|
||||
#include "common/swaglog.h"
|
||||
#include "common/timing.h"
|
||||
#include "common/util.h"
|
||||
|
||||
RateKeeper::RateKeeper(const std::string &name, float rate, float print_delay_threshold)
|
||||
: name(name),
|
||||
print_delay_threshold(std::max(0.f, print_delay_threshold)) {
|
||||
interval = 1 / rate;
|
||||
last_monitor_time = seconds_since_boot();
|
||||
next_frame_time = last_monitor_time + interval;
|
||||
}
|
||||
|
||||
bool RateKeeper::keepTime() {
|
||||
bool lagged = monitorTime();
|
||||
if (remaining_ > 0) {
|
||||
util::sleep_for(remaining_ * 1000);
|
||||
}
|
||||
return lagged;
|
||||
}
|
||||
|
||||
bool RateKeeper::monitorTime() {
|
||||
++frame_;
|
||||
last_monitor_time = seconds_since_boot();
|
||||
remaining_ = next_frame_time - last_monitor_time;
|
||||
|
||||
bool lagged = remaining_ < 0;
|
||||
if (lagged) {
|
||||
if (print_delay_threshold > 0 && remaining_ < -print_delay_threshold) {
|
||||
LOGW("%s lagging by %.2f ms", name.c_str(), -remaining_ * 1000);
|
||||
}
|
||||
next_frame_time = last_monitor_time + interval;
|
||||
} else {
|
||||
next_frame_time += interval;
|
||||
}
|
||||
return lagged;
|
||||
}
|
||||
23
common/ratekeeper.h
Normal file
23
common/ratekeeper.h
Normal file
@@ -0,0 +1,23 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <string>
|
||||
|
||||
class RateKeeper {
|
||||
public:
|
||||
RateKeeper(const std::string &name, float rate, float print_delay_threshold = 0);
|
||||
~RateKeeper() {}
|
||||
bool keepTime();
|
||||
bool monitorTime();
|
||||
inline double frame() const { return frame_; }
|
||||
inline double remaining() const { return remaining_; }
|
||||
|
||||
private:
|
||||
double interval;
|
||||
double next_frame_time;
|
||||
double last_monitor_time;
|
||||
double remaining_ = 0;
|
||||
float print_delay_threshold = 0;
|
||||
uint64_t frame_ = 0;
|
||||
std::string name;
|
||||
};
|
||||
@@ -3,7 +3,6 @@ import gc
|
||||
import os
|
||||
import time
|
||||
from collections import deque
|
||||
from typing import Optional, List, Union
|
||||
|
||||
from setproctitle import getproctitle
|
||||
|
||||
@@ -33,12 +32,12 @@ def set_realtime_priority(level: int) -> None:
|
||||
os.sched_setscheduler(0, os.SCHED_FIFO, os.sched_param(level))
|
||||
|
||||
|
||||
def set_core_affinity(cores: List[int]) -> None:
|
||||
def set_core_affinity(cores: list[int]) -> None:
|
||||
if not PC:
|
||||
os.sched_setaffinity(0, cores)
|
||||
|
||||
|
||||
def config_realtime_process(cores: Union[int, List[int]], priority: int) -> None:
|
||||
def config_realtime_process(cores: int | list[int], priority: int) -> None:
|
||||
gc.disable()
|
||||
set_realtime_priority(priority)
|
||||
c = cores if isinstance(cores, list) else [cores, ]
|
||||
@@ -46,7 +45,7 @@ def config_realtime_process(cores: Union[int, List[int]], priority: int) -> None
|
||||
|
||||
|
||||
class Ratekeeper:
|
||||
def __init__(self, rate: float, print_delay_threshold: Optional[float] = 0.0) -> None:
|
||||
def __init__(self, rate: float, print_delay_threshold: float | None = 0.0) -> None:
|
||||
"""Rate in Hz for ratekeeping. print_delay_threshold must be nonnegative."""
|
||||
self._interval = 1. / rate
|
||||
self._next_frame_time = time.monotonic() + self._interval
|
||||
|
||||
152
common/swaglog.cc
Normal file
152
common/swaglog.cc
Normal file
@@ -0,0 +1,152 @@
|
||||
#ifndef _GNU_SOURCE
|
||||
#define _GNU_SOURCE
|
||||
#endif
|
||||
|
||||
#include "common/swaglog.h"
|
||||
|
||||
#include <cassert>
|
||||
#include <limits>
|
||||
#include <mutex>
|
||||
#include <string>
|
||||
|
||||
#include <zmq.h>
|
||||
#include <stdarg.h>
|
||||
#include "third_party/json11/json11.hpp"
|
||||
#include "common/version.h"
|
||||
#include "system/hardware/hw.h"
|
||||
|
||||
class SwaglogState {
|
||||
public:
|
||||
SwaglogState() {
|
||||
zctx = zmq_ctx_new();
|
||||
sock = zmq_socket(zctx, ZMQ_PUSH);
|
||||
|
||||
// Timeout on shutdown for messages to be received by the logging process
|
||||
int timeout = 100;
|
||||
zmq_setsockopt(sock, ZMQ_LINGER, &timeout, sizeof(timeout));
|
||||
zmq_connect(sock, Path::swaglog_ipc().c_str());
|
||||
|
||||
print_level = CLOUDLOG_WARNING;
|
||||
if (const char* print_lvl = getenv("LOGPRINT")) {
|
||||
if (strcmp(print_lvl, "debug") == 0) {
|
||||
print_level = CLOUDLOG_DEBUG;
|
||||
} else if (strcmp(print_lvl, "info") == 0) {
|
||||
print_level = CLOUDLOG_INFO;
|
||||
} else if (strcmp(print_lvl, "warning") == 0) {
|
||||
print_level = CLOUDLOG_WARNING;
|
||||
}
|
||||
}
|
||||
|
||||
ctx_j = json11::Json::object{};
|
||||
if (char* dongle_id = getenv("DONGLE_ID")) {
|
||||
ctx_j["dongle_id"] = dongle_id;
|
||||
}
|
||||
if (char* git_origin = getenv("GIT_ORIGIN")) {
|
||||
ctx_j["origin"] = git_origin;
|
||||
}
|
||||
if (char* git_branch = getenv("GIT_BRANCH")) {
|
||||
ctx_j["branch"] = git_branch;
|
||||
}
|
||||
if (char* git_commit = getenv("GIT_COMMIT")) {
|
||||
ctx_j["commit"] = git_commit;
|
||||
}
|
||||
if (char* daemon_name = getenv("MANAGER_DAEMON")) {
|
||||
ctx_j["daemon"] = daemon_name;
|
||||
}
|
||||
ctx_j["version"] = COMMA_VERSION;
|
||||
ctx_j["dirty"] = !getenv("CLEAN");
|
||||
ctx_j["device"] = Hardware::get_name();
|
||||
}
|
||||
|
||||
~SwaglogState() {
|
||||
zmq_close(sock);
|
||||
zmq_ctx_destroy(zctx);
|
||||
}
|
||||
|
||||
void log(int levelnum, const char* filename, int lineno, const char* func, const char* msg, const std::string& log_s) {
|
||||
std::lock_guard lk(lock);
|
||||
if (levelnum >= print_level) {
|
||||
printf("%s: %s\n", filename, msg);
|
||||
}
|
||||
zmq_send(sock, log_s.data(), log_s.length(), ZMQ_NOBLOCK);
|
||||
}
|
||||
|
||||
std::mutex lock;
|
||||
void* zctx = nullptr;
|
||||
void* sock = nullptr;
|
||||
int print_level;
|
||||
json11::Json::object ctx_j;
|
||||
};
|
||||
|
||||
bool LOG_TIMESTAMPS = getenv("LOG_TIMESTAMPS");
|
||||
uint32_t NO_FRAME_ID = std::numeric_limits<uint32_t>::max();
|
||||
|
||||
static void cloudlog_common(int levelnum, const char* filename, int lineno, const char* func,
|
||||
char* msg_buf, const json11::Json::object &msg_j={}) {
|
||||
static SwaglogState s;
|
||||
|
||||
json11::Json::object log_j = json11::Json::object {
|
||||
{"ctx", s.ctx_j},
|
||||
{"levelnum", levelnum},
|
||||
{"filename", filename},
|
||||
{"lineno", lineno},
|
||||
{"funcname", func},
|
||||
{"created", seconds_since_epoch()}
|
||||
};
|
||||
if (msg_j.empty()) {
|
||||
log_j["msg"] = msg_buf;
|
||||
} else {
|
||||
log_j["msg"] = msg_j;
|
||||
}
|
||||
|
||||
std::string log_s;
|
||||
log_s += (char)levelnum;
|
||||
((json11::Json)log_j).dump(log_s);
|
||||
s.log(levelnum, filename, lineno, func, msg_buf, log_s);
|
||||
|
||||
free(msg_buf);
|
||||
}
|
||||
|
||||
void cloudlog_e(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) {
|
||||
va_list args;
|
||||
va_start(args, fmt);
|
||||
char* msg_buf = nullptr;
|
||||
int ret = vasprintf(&msg_buf, fmt, args);
|
||||
va_end(args);
|
||||
if (ret <= 0 || !msg_buf) return;
|
||||
cloudlog_common(levelnum, filename, lineno, func, msg_buf);
|
||||
}
|
||||
|
||||
void cloudlog_t_common(int levelnum, const char* filename, int lineno, const char* func,
|
||||
uint32_t frame_id, const char* fmt, va_list args) {
|
||||
if (!LOG_TIMESTAMPS) return;
|
||||
char* msg_buf = nullptr;
|
||||
int ret = vasprintf(&msg_buf, fmt, args);
|
||||
if (ret <= 0 || !msg_buf) return;
|
||||
json11::Json::object tspt_j = json11::Json::object{
|
||||
{"event", msg_buf},
|
||||
{"time", std::to_string(nanos_since_boot())}
|
||||
};
|
||||
if (frame_id < NO_FRAME_ID) {
|
||||
tspt_j["frame_id"] = std::to_string(frame_id);
|
||||
}
|
||||
tspt_j = json11::Json::object{{"timestamp", tspt_j}};
|
||||
cloudlog_common(levelnum, filename, lineno, func, msg_buf, tspt_j);
|
||||
}
|
||||
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) {
|
||||
va_list args;
|
||||
va_start(args, fmt);
|
||||
cloudlog_t_common(levelnum, filename, lineno, func, NO_FRAME_ID, fmt, args);
|
||||
va_end(args);
|
||||
}
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
uint32_t frame_id, const char* fmt, ...) {
|
||||
va_list args;
|
||||
va_start(args, fmt);
|
||||
cloudlog_t_common(levelnum, filename, lineno, func, frame_id, fmt, args);
|
||||
va_end(args);
|
||||
}
|
||||
76
common/swaglog.h
Normal file
76
common/swaglog.h
Normal file
@@ -0,0 +1,76 @@
|
||||
#pragma once
|
||||
|
||||
#include "common/timing.h"
|
||||
|
||||
#define CLOUDLOG_DEBUG 10
|
||||
#define CLOUDLOG_INFO 20
|
||||
#define CLOUDLOG_WARNING 30
|
||||
#define CLOUDLOG_ERROR 40
|
||||
#define CLOUDLOG_CRITICAL 50
|
||||
|
||||
|
||||
#ifdef __GNUC__
|
||||
#define SWAG_LOG_CHECK_FMT(a, b) __attribute__ ((format (printf, a, b)))
|
||||
#else
|
||||
#define SWAG_LOG_CHECK_FMT(a, b)
|
||||
#endif
|
||||
|
||||
void cloudlog_e(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) SWAG_LOG_CHECK_FMT(5, 6);
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) SWAG_LOG_CHECK_FMT(5, 6);
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
uint32_t frame_id, const char* fmt, ...) SWAG_LOG_CHECK_FMT(6, 7);
|
||||
|
||||
|
||||
#define cloudlog(lvl, fmt, ...) cloudlog_e(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
fmt, ## __VA_ARGS__)
|
||||
|
||||
#define cloudlog_t(lvl, ...) cloudlog_te(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
__VA_ARGS__)
|
||||
|
||||
|
||||
#define cloudlog_rl(burst, millis, lvl, fmt, ...) \
|
||||
{ \
|
||||
static uint64_t __begin = 0; \
|
||||
static int __printed = 0; \
|
||||
static int __missed = 0; \
|
||||
\
|
||||
int __burst = (burst); \
|
||||
int __millis = (millis); \
|
||||
uint64_t __ts = nanos_since_boot(); \
|
||||
\
|
||||
if (!__begin) { __begin = __ts; } \
|
||||
\
|
||||
if (__begin + __millis*1000000ULL < __ts) { \
|
||||
if (__missed) { \
|
||||
cloudlog(CLOUDLOG_WARNING, "cloudlog: %d messages suppressed", __missed); \
|
||||
} \
|
||||
__begin = 0; \
|
||||
__printed = 0; \
|
||||
__missed = 0; \
|
||||
} \
|
||||
\
|
||||
if (__printed < __burst) { \
|
||||
cloudlog(lvl, fmt, ## __VA_ARGS__); \
|
||||
__printed++; \
|
||||
} else { \
|
||||
__missed++; \
|
||||
} \
|
||||
}
|
||||
|
||||
|
||||
#define LOGT(...) cloudlog_t(CLOUDLOG_DEBUG, __VA_ARGS__)
|
||||
#define LOGD(fmt, ...) cloudlog(CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG(fmt, ...) cloudlog(CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW(fmt, ...) cloudlog(CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE(fmt, ...) cloudlog(CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
|
||||
#define LOGD_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
1
common/tests/.gitignore
vendored
Normal file
1
common/tests/.gitignore
vendored
Normal file
@@ -0,0 +1 @@
|
||||
test_common
|
||||
0
common/tests/__init__.py
Normal file
0
common/tests/__init__.py
Normal file
24
common/tests/test_file_helpers.py
Normal file
24
common/tests/test_file_helpers.py
Normal file
@@ -0,0 +1,24 @@
|
||||
import os
|
||||
import unittest
|
||||
from uuid import uuid4
|
||||
|
||||
from openpilot.common.file_helpers import atomic_write_in_dir
|
||||
|
||||
|
||||
class TestFileHelpers(unittest.TestCase):
|
||||
def run_atomic_write_func(self, atomic_write_func):
|
||||
path = f"/tmp/tmp{uuid4()}"
|
||||
with atomic_write_func(path) as f:
|
||||
f.write("test")
|
||||
assert not os.path.exists(path)
|
||||
|
||||
with open(path) as f:
|
||||
self.assertEqual(f.read(), "test")
|
||||
os.remove(path)
|
||||
|
||||
def test_atomic_write_in_dir(self):
|
||||
self.run_atomic_write_func(atomic_write_in_dir)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
26
common/tests/test_numpy_fast.py
Normal file
26
common/tests/test_numpy_fast.py
Normal file
@@ -0,0 +1,26 @@
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
from openpilot.common.numpy_fast import interp
|
||||
|
||||
|
||||
class InterpTest(unittest.TestCase):
|
||||
def test_correctness_controls(self):
|
||||
_A_CRUISE_MIN_BP = np.asarray([0., 5., 10., 20., 40.])
|
||||
_A_CRUISE_MIN_V = np.asarray([-1.0, -.8, -.67, -.5, -.30])
|
||||
v_ego_arr = [-1, -1e-12, 0, 4, 5, 6, 7, 10, 11, 15.2, 20, 21, 39,
|
||||
39.999999, 40, 41]
|
||||
|
||||
expected = np.interp(v_ego_arr, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
actual = interp(v_ego_arr, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
|
||||
np.testing.assert_equal(actual, expected)
|
||||
|
||||
for v_ego in v_ego_arr:
|
||||
expected = np.interp(v_ego, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
actual = interp(v_ego, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
np.testing.assert_equal(actual, expected)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
27
common/tests/test_params.cc
Normal file
27
common/tests/test_params.cc
Normal file
@@ -0,0 +1,27 @@
|
||||
#include "catch2/catch.hpp"
|
||||
#define private public
|
||||
#include "common/params.h"
|
||||
#include "common/util.h"
|
||||
|
||||
TEST_CASE("params_nonblocking_put") {
|
||||
char tmp_path[] = "/tmp/asyncWriter_XXXXXX";
|
||||
const std::string param_path = mkdtemp(tmp_path);
|
||||
auto param_names = {"CarParams", "IsMetric"};
|
||||
{
|
||||
Params params(param_path);
|
||||
for (const auto &name : param_names) {
|
||||
params.putNonBlocking(name, "1");
|
||||
// param is empty
|
||||
REQUIRE(params.get(name).empty());
|
||||
}
|
||||
|
||||
// check if thread is running
|
||||
REQUIRE(params.future.valid());
|
||||
REQUIRE(params.future.wait_for(std::chrono::milliseconds(0)) == std::future_status::timeout);
|
||||
}
|
||||
// check results
|
||||
Params p(param_path);
|
||||
for (const auto &name : param_names) {
|
||||
REQUIRE(p.get(name) == "1");
|
||||
}
|
||||
}
|
||||
113
common/tests/test_params.py
Normal file
113
common/tests/test_params.py
Normal file
@@ -0,0 +1,113 @@
|
||||
import os
|
||||
import threading
|
||||
import time
|
||||
import uuid
|
||||
import unittest
|
||||
|
||||
from openpilot.common.params import Params, ParamKeyType, UnknownKeyName
|
||||
|
||||
class TestParams(unittest.TestCase):
|
||||
def setUp(self):
|
||||
self.params = Params()
|
||||
|
||||
def test_params_put_and_get(self):
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("DongleId") == b"cb38263377b873ee"
|
||||
|
||||
def test_params_non_ascii(self):
|
||||
st = b"\xe1\x90\xff"
|
||||
self.params.put("CarParams", st)
|
||||
assert self.params.get("CarParams") == st
|
||||
|
||||
def test_params_get_cleared_manager_start(self):
|
||||
self.params.put("CarParams", "test")
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("CarParams") == b"test"
|
||||
|
||||
undefined_param = self.params.get_param_path(uuid.uuid4().hex)
|
||||
with open(undefined_param, "w") as f:
|
||||
f.write("test")
|
||||
assert os.path.isfile(undefined_param)
|
||||
|
||||
self.params.clear_all(ParamKeyType.CLEAR_ON_MANAGER_START)
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("DongleId") is not None
|
||||
assert not os.path.isfile(undefined_param)
|
||||
|
||||
def test_params_two_things(self):
|
||||
self.params.put("DongleId", "bob")
|
||||
self.params.put("AthenadPid", "123")
|
||||
assert self.params.get("DongleId") == b"bob"
|
||||
assert self.params.get("AthenadPid") == b"123"
|
||||
|
||||
def test_params_get_block(self):
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put("CarParams", "test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("CarParams", True) == b"test"
|
||||
|
||||
def test_params_unknown_key_fails(self):
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.get("swag")
|
||||
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.get_bool("swag")
|
||||
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.put("swag", "abc")
|
||||
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.put_bool("swag", True)
|
||||
|
||||
def test_remove_not_there(self):
|
||||
assert self.params.get("CarParams") is None
|
||||
self.params.remove("CarParams")
|
||||
assert self.params.get("CarParams") is None
|
||||
|
||||
def test_get_bool(self):
|
||||
self.params.remove("IsMetric")
|
||||
self.assertFalse(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put_bool("IsMetric", True)
|
||||
self.assertTrue(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put_bool("IsMetric", False)
|
||||
self.assertFalse(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put("IsMetric", "1")
|
||||
self.assertTrue(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put("IsMetric", "0")
|
||||
self.assertFalse(self.params.get_bool("IsMetric"))
|
||||
|
||||
def test_put_non_blocking_with_get_block(self):
|
||||
q = Params()
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
Params().put_nonblocking("CarParams", "test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"test"
|
||||
|
||||
def test_put_bool_non_blocking_with_get_block(self):
|
||||
q = Params()
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
Params().put_bool_nonblocking("CarParams", True)
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"1"
|
||||
|
||||
def test_params_all_keys(self):
|
||||
keys = Params().all_keys()
|
||||
|
||||
# sanity checks
|
||||
assert len(keys) > 20
|
||||
assert len(keys) == len(set(keys))
|
||||
assert b"CarParams" in keys
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
2
common/tests/test_runner.cc
Normal file
2
common/tests/test_runner.cc
Normal file
@@ -0,0 +1,2 @@
|
||||
#define CATCH_CONFIG_MAIN
|
||||
#include "catch2/catch.hpp"
|
||||
35
common/tests/test_simple_kalman.py
Normal file
35
common/tests/test_simple_kalman.py
Normal file
@@ -0,0 +1,35 @@
|
||||
import unittest
|
||||
|
||||
from openpilot.common.simple_kalman import KF1D
|
||||
|
||||
|
||||
class TestSimpleKalman(unittest.TestCase):
|
||||
def setUp(self):
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
self.kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
|
||||
def test_getter_setter(self):
|
||||
self.kf.set_x([[1.0], [1.0]])
|
||||
self.assertEqual(self.kf.x, [[1.0], [1.0]])
|
||||
|
||||
def update_returns_state(self):
|
||||
x = self.kf.update(100)
|
||||
self.assertEqual(x, self.kf.x)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
88
common/tests/test_swaglog.cc
Normal file
88
common/tests/test_swaglog.cc
Normal file
@@ -0,0 +1,88 @@
|
||||
#include <zmq.h>
|
||||
|
||||
#include <iostream>
|
||||
|
||||
#include "catch2/catch.hpp"
|
||||
#include "common/swaglog.h"
|
||||
#include "common/util.h"
|
||||
#include "common/version.h"
|
||||
#include "system/hardware/hw.h"
|
||||
#include "third_party/json11/json11.hpp"
|
||||
|
||||
std::string daemon_name = "testy";
|
||||
std::string dongle_id = "test_dongle_id";
|
||||
int LINE_NO = 0;
|
||||
|
||||
void log_thread(int thread_id, int msg_cnt) {
|
||||
for (int i = 0; i < msg_cnt; ++i) {
|
||||
LOGD("%d", thread_id);
|
||||
LINE_NO = __LINE__ - 1;
|
||||
usleep(1);
|
||||
}
|
||||
}
|
||||
|
||||
void recv_log(int thread_cnt, int thread_msg_cnt) {
|
||||
void *zctx = zmq_ctx_new();
|
||||
void *sock = zmq_socket(zctx, ZMQ_PULL);
|
||||
zmq_bind(sock, Path::swaglog_ipc().c_str());
|
||||
std::vector<int> thread_msgs(thread_cnt);
|
||||
int total_count = 0;
|
||||
|
||||
for (auto start = std::chrono::steady_clock::now(), now = start;
|
||||
now < start + std::chrono::seconds{1} && total_count < (thread_cnt * thread_msg_cnt);
|
||||
now = std::chrono::steady_clock::now()) {
|
||||
char buf[4096] = {};
|
||||
if (zmq_recv(sock, buf, sizeof(buf), ZMQ_DONTWAIT) <= 0) {
|
||||
if (errno == EAGAIN || errno == EINTR || errno == EFSM) continue;
|
||||
break;
|
||||
}
|
||||
|
||||
REQUIRE(buf[0] == CLOUDLOG_DEBUG);
|
||||
std::string err;
|
||||
auto msg = json11::Json::parse(buf + 1, err);
|
||||
REQUIRE(!msg.is_null());
|
||||
|
||||
REQUIRE(msg["levelnum"].int_value() == CLOUDLOG_DEBUG);
|
||||
REQUIRE_THAT(msg["filename"].string_value(), Catch::Contains("test_swaglog.cc"));
|
||||
REQUIRE(msg["funcname"].string_value() == "log_thread");
|
||||
REQUIRE(msg["lineno"].int_value() == LINE_NO);
|
||||
|
||||
auto ctx = msg["ctx"];
|
||||
|
||||
REQUIRE(ctx["daemon"].string_value() == daemon_name);
|
||||
REQUIRE(ctx["dongle_id"].string_value() == dongle_id);
|
||||
REQUIRE(ctx["dirty"].bool_value() == true);
|
||||
|
||||
REQUIRE(ctx["version"].string_value() == COMMA_VERSION);
|
||||
|
||||
std::string device = Hardware::get_name();
|
||||
REQUIRE(ctx["device"].string_value() == device);
|
||||
|
||||
int thread_id = atoi(msg["msg"].string_value().c_str());
|
||||
REQUIRE((thread_id >= 0 && thread_id < thread_cnt));
|
||||
thread_msgs[thread_id]++;
|
||||
total_count++;
|
||||
}
|
||||
for (int i = 0; i < thread_cnt; ++i) {
|
||||
INFO("thread :" << i);
|
||||
REQUIRE(thread_msgs[i] == thread_msg_cnt);
|
||||
}
|
||||
zmq_close(sock);
|
||||
zmq_ctx_destroy(zctx);
|
||||
}
|
||||
|
||||
TEST_CASE("swaglog") {
|
||||
setenv("MANAGER_DAEMON", daemon_name.c_str(), 1);
|
||||
setenv("DONGLE_ID", dongle_id.c_str(), 1);
|
||||
setenv("dirty", "1", 1);
|
||||
const int thread_cnt = 5;
|
||||
const int thread_msg_cnt = 100;
|
||||
|
||||
std::vector<std::thread> log_threads;
|
||||
for (int i = 0; i < thread_cnt; ++i) {
|
||||
log_threads.push_back(std::thread(log_thread, i, thread_msg_cnt));
|
||||
}
|
||||
for (auto &t : log_threads) t.join();
|
||||
|
||||
recv_log(thread_cnt, thread_msg_cnt);
|
||||
}
|
||||
147
common/tests/test_util.cc
Normal file
147
common/tests/test_util.cc
Normal file
@@ -0,0 +1,147 @@
|
||||
|
||||
#include <dirent.h>
|
||||
#include <sys/stat.h>
|
||||
#include <sys/types.h>
|
||||
|
||||
#include <algorithm>
|
||||
#include <climits>
|
||||
#include <fstream>
|
||||
#include <random>
|
||||
#include <string>
|
||||
|
||||
#include "catch2/catch.hpp"
|
||||
#include "common/util.h"
|
||||
|
||||
std::string random_bytes(int size) {
|
||||
std::random_device rd;
|
||||
std::independent_bits_engine<std::default_random_engine, CHAR_BIT, unsigned char> rbe(rd());
|
||||
std::string bytes(size + 1, '\0');
|
||||
std::generate(bytes.begin(), bytes.end(), std::ref(rbe));
|
||||
return bytes;
|
||||
}
|
||||
|
||||
TEST_CASE("util::read_file") {
|
||||
SECTION("read /proc/version") {
|
||||
std::string ret = util::read_file("/proc/version");
|
||||
REQUIRE(ret.find("Linux version") != std::string::npos);
|
||||
}
|
||||
SECTION("read from sysfs") {
|
||||
std::string ret = util::read_file("/sys/power/wakeup_count");
|
||||
REQUIRE(!ret.empty());
|
||||
}
|
||||
SECTION("read file") {
|
||||
char filename[] = "/tmp/test_read_XXXXXX";
|
||||
int fd = mkstemp(filename);
|
||||
|
||||
REQUIRE(util::read_file(filename).empty());
|
||||
|
||||
std::string content = random_bytes(64 * 1024);
|
||||
write(fd, content.c_str(), content.size());
|
||||
std::string ret = util::read_file(filename);
|
||||
bool equal = (ret == content);
|
||||
REQUIRE(equal);
|
||||
close(fd);
|
||||
}
|
||||
SECTION("read directory") {
|
||||
REQUIRE(util::read_file(".").empty());
|
||||
}
|
||||
SECTION("read non-existent file") {
|
||||
std::string ret = util::read_file("does_not_exist");
|
||||
REQUIRE(ret.empty());
|
||||
}
|
||||
SECTION("read non-permission") {
|
||||
REQUIRE(util::read_file("/proc/kmsg").empty());
|
||||
}
|
||||
}
|
||||
|
||||
TEST_CASE("util::file_exists") {
|
||||
char filename[] = "/tmp/test_file_exists_XXXXXX";
|
||||
int fd = mkstemp(filename);
|
||||
REQUIRE(fd != -1);
|
||||
close(fd);
|
||||
|
||||
SECTION("existent file") {
|
||||
REQUIRE(util::file_exists(filename));
|
||||
REQUIRE(util::file_exists("/tmp"));
|
||||
}
|
||||
SECTION("nonexistent file") {
|
||||
std::string fn = filename;
|
||||
REQUIRE(!util::file_exists(fn + "/nonexistent"));
|
||||
}
|
||||
SECTION("file has no access permissions") {
|
||||
std::string fn = "/proc/kmsg";
|
||||
std::ifstream f(fn);
|
||||
REQUIRE(f.good() == false);
|
||||
REQUIRE(util::file_exists(fn));
|
||||
}
|
||||
::remove(filename);
|
||||
}
|
||||
|
||||
TEST_CASE("util::read_files_in_dir") {
|
||||
char tmp_path[] = "/tmp/test_XXXXXX";
|
||||
const std::string test_path = mkdtemp(tmp_path);
|
||||
const std::string files[] = {".test1", "'test2'", "test3"};
|
||||
for (auto fn : files) {
|
||||
std::ofstream{test_path + "/" + fn} << fn;
|
||||
}
|
||||
mkdir((test_path + "/dir").c_str(), 0777);
|
||||
|
||||
std::map<std::string, std::string> result = util::read_files_in_dir(test_path);
|
||||
REQUIRE(result.find("dir") == result.end());
|
||||
REQUIRE(result.size() == std::size(files));
|
||||
for (auto& [k, v] : result) {
|
||||
REQUIRE(k == v);
|
||||
}
|
||||
}
|
||||
|
||||
|
||||
TEST_CASE("util::safe_fwrite") {
|
||||
char filename[] = "/tmp/XXXXXX";
|
||||
int fd = mkstemp(filename);
|
||||
close(fd);
|
||||
std::string dat = random_bytes(1024 * 1024);
|
||||
|
||||
FILE *f = util::safe_fopen(filename, "wb");
|
||||
REQUIRE(f != nullptr);
|
||||
size_t size = util::safe_fwrite(dat.data(), 1, dat.size(), f);
|
||||
REQUIRE(size == dat.size());
|
||||
int ret = util::safe_fflush(f);
|
||||
REQUIRE(ret == 0);
|
||||
ret = fclose(f);
|
||||
REQUIRE(ret == 0);
|
||||
bool equal = (dat == util::read_file(filename));
|
||||
REQUIRE(equal);
|
||||
}
|
||||
|
||||
TEST_CASE("util::create_directories") {
|
||||
system("rm /tmp/test_create_directories -rf");
|
||||
std::string dir = "/tmp/test_create_directories/a/b/c/d/e/f";
|
||||
|
||||
auto check_dir_permissions = [](const std::string &dir, mode_t mode) -> bool {
|
||||
struct stat st = {};
|
||||
return stat(dir.c_str(), &st) == 0 && (st.st_mode & S_IFMT) == S_IFDIR && (st.st_mode & (S_IRWXU | S_IRWXG | S_IRWXO)) == mode;
|
||||
};
|
||||
|
||||
SECTION("create_directories") {
|
||||
REQUIRE(util::create_directories(dir, 0755));
|
||||
REQUIRE(check_dir_permissions(dir, 0755));
|
||||
}
|
||||
SECTION("dir already exists") {
|
||||
REQUIRE(util::create_directories(dir, 0755));
|
||||
REQUIRE(util::create_directories(dir, 0755));
|
||||
}
|
||||
SECTION("a file exists with the same name") {
|
||||
REQUIRE(util::create_directories(dir, 0755));
|
||||
int f = open((dir + "/file").c_str(), O_RDWR | O_CREAT);
|
||||
REQUIRE(f != -1);
|
||||
close(f);
|
||||
REQUIRE(util::create_directories(dir + "/file", 0755) == false);
|
||||
REQUIRE(util::create_directories(dir + "/file/1/2/3", 0755) == false);
|
||||
}
|
||||
SECTION("end with slashes") {
|
||||
REQUIRE(util::create_directories(dir + "/", 0755));
|
||||
}
|
||||
SECTION("empty") {
|
||||
REQUIRE(util::create_directories("", 0755) == false);
|
||||
}
|
||||
}
|
||||
@@ -1,6 +1,6 @@
|
||||
import datetime
|
||||
|
||||
MIN_DATE = datetime.datetime(year=2024, month=1, day=28)
|
||||
MIN_DATE = datetime.datetime(year=2024, month=3, day=1)
|
||||
|
||||
def system_time_valid():
|
||||
return datetime.datetime.now() > MIN_DATE
|
||||
|
||||
51
common/timing.h
Normal file
51
common/timing.h
Normal file
@@ -0,0 +1,51 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <ctime>
|
||||
|
||||
#ifdef __APPLE__
|
||||
#define CLOCK_BOOTTIME CLOCK_MONOTONIC
|
||||
#endif
|
||||
|
||||
static inline uint64_t nanos_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double millis_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000.0 + t.tv_nsec * 1e-6;
|
||||
}
|
||||
|
||||
static inline double seconds_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double seconds_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
// you probably should use nanos_since_boot instead
|
||||
static inline uint64_t nanos_monotonic() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_monotonic_raw() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC_RAW, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
2
common/transformations/.gitignore
vendored
Normal file
2
common/transformations/.gitignore
vendored
Normal file
@@ -0,0 +1,2 @@
|
||||
transformations
|
||||
transformations.cpp
|
||||
70
common/transformations/README.md
Normal file
70
common/transformations/README.md
Normal file
@@ -0,0 +1,70 @@
|
||||
|
||||
Reference Frames
|
||||
------
|
||||
Many reference frames are used throughout. This
|
||||
folder contains all helper functions needed to
|
||||
transform between them. Generally this is done
|
||||
by generating a rotation matrix and multiplying.
|
||||
|
||||
|
||||
| Name | [x, y, z] | Units | Notes |
|
||||
| :-------------: |:-------------:| :-----:| :----: |
|
||||
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
|
||||
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83. <br> This is the global Mesh3D frame. |
|
||||
| NED | [North, East, Down] | meters | Relative to earth's surface, useful for visualizing. |
|
||||
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame. <br> Relative to camera, **not imu.** <br> 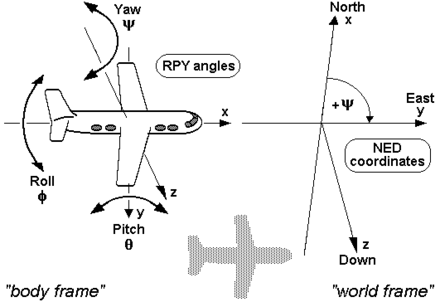|
|
||||
| Calibrated | [Forward, Right, Down] | meters | This is the frame the model outputs are in. <br> More details below. <br>|
|
||||
| Car | [Forward, Right, Down] | meters | This is useful for estimating position of points on the road. <br> More details below. <br>|
|
||||
| View | [Right, Down, Forward] | meters | Like device frame, but according to camera conventions. |
|
||||
| Camera | [u, v, focal] | pixels | Like view frame, but 2d on the camera image.|
|
||||
| Normalized Camera | [u / focal, v / focal, 1] | / | |
|
||||
| Model | [u, v, focal] | pixels | The sampled rectangle of the full camera frame the model uses. |
|
||||
| Normalized Model | [u / focal, v / focal, 1] | / | |
|
||||
|
||||
|
||||
|
||||
|
||||
Orientation Conventions
|
||||
------
|
||||
Quaternions, rotation matrices and euler angles are three
|
||||
equivalent representations of orientation and all three are
|
||||
used throughout the code base.
|
||||
|
||||
For euler angles the preferred convention is [roll, pitch, yaw]
|
||||
which corresponds to rotations around the [x, y, z] axes. All
|
||||
euler angles should always be in radians or radians/s unless
|
||||
for plotting or display purposes. For quaternions the hamilton
|
||||
notations is preferred which is [q<sub>w</sub>, q<sub>x</sub>, q<sub>y</sub>, q<sub>z</sub>]. All quaternions
|
||||
should always be normalized with a strictly positive q<sub>w</sub>. **These
|
||||
quaternions are a unique representation of orientation whereas euler angles
|
||||
or rotation matrices are not.**
|
||||
|
||||
To rotate from one frame into another with euler angles the
|
||||
convention is to rotate around roll, then pitch and then yaw,
|
||||
while rotating around the rotated axes, not the original axes.
|
||||
|
||||
|
||||
Car frame
|
||||
------
|
||||
Device frame is aligned with the road-facing camera used by openpilot. However, when controlling the vehicle it is helpful to think in a reference frame aligned with the vehicle. These two reference frames can be different.
|
||||
|
||||
The orientation of car frame is defined to be aligned with the car's direction of travel and the road plane when the vehicle is driving on a flat road and not turning. The origin of car frame is defined to be directly below device frame (in car frame), such that it is on the road plane. The position and orientation of this frame is not necessarily always aligned with the direction of travel or the road plane due to suspension movements and other effects.
|
||||
|
||||
|
||||
Calibrated frame
|
||||
------
|
||||
It is helpful for openpilot's driving model to take in images that look similar when mounted differently in different cars. To achieve this we "calibrate" the images by transforming it into calibrated frame. Calibrated frame is defined to be aligned with car frame in pitch and yaw, and aligned with device frame in roll. It also has the same origin as device frame.
|
||||
|
||||
|
||||
Example
|
||||
------
|
||||
To transform global Mesh3D positions and orientations (positions_ecef, quats_ecef) into the local frame described by the
|
||||
first position and orientation from Mesh3D one would do:
|
||||
```
|
||||
ecef_from_local = rot_from_quat(quats_ecef[0])
|
||||
local_from_ecef = ecef_from_local.T
|
||||
positions_local = np.einsum('ij,kj->ki', local_from_ecef, postions_ecef - positions_ecef[0])
|
||||
rotations_global = rot_from_quat(quats_ecef)
|
||||
rotations_local = np.einsum('ij,kjl->kil', local_from_ecef, rotations_global)
|
||||
eulers_local = euler_from_rot(rotations_local)
|
||||
```
|
||||
5
common/transformations/SConscript
Normal file
5
common/transformations/SConscript
Normal file
@@ -0,0 +1,5 @@
|
||||
Import('env', 'envCython')
|
||||
|
||||
transformations = env.Library('transformations', ['orientation.cc', 'coordinates.cc'])
|
||||
transformations_python = envCython.Program('transformations.so', 'transformations.pyx')
|
||||
Export('transformations', 'transformations_python')
|
||||
@@ -1,55 +1,74 @@
|
||||
import itertools
|
||||
import numpy as np
|
||||
from dataclasses import dataclass
|
||||
|
||||
import openpilot.common.transformations.orientation as orient
|
||||
|
||||
## -- hardcoded hardware params --
|
||||
eon_f_focal_length = 910.0
|
||||
eon_d_focal_length = 650.0
|
||||
tici_f_focal_length = 2648.0
|
||||
tici_e_focal_length = tici_d_focal_length = 567.0 # probably wrong? magnification is not consistent across frame
|
||||
@dataclass(frozen=True)
|
||||
class CameraConfig:
|
||||
width: int
|
||||
height: int
|
||||
focal_length: float
|
||||
|
||||
eon_f_frame_size = (1164, 874)
|
||||
eon_d_frame_size = (816, 612)
|
||||
tici_f_frame_size = tici_e_frame_size = tici_d_frame_size = (1928, 1208)
|
||||
@property
|
||||
def size(self):
|
||||
return (self.width, self.height)
|
||||
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
eon_fcam_intrinsics = np.array([
|
||||
[eon_f_focal_length, 0.0, float(eon_f_frame_size[0])/2],
|
||||
[0.0, eon_f_focal_length, float(eon_f_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
eon_intrinsics = eon_fcam_intrinsics # xx
|
||||
@property
|
||||
def intrinsics(self):
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
return np.array([
|
||||
[self.focal_length, 0.0, float(self.width)/2],
|
||||
[0.0, self.focal_length, float(self.height)/2],
|
||||
[0.0, 0.0, 1.0]
|
||||
])
|
||||
|
||||
eon_dcam_intrinsics = np.array([
|
||||
[eon_d_focal_length, 0.0, float(eon_d_frame_size[0])/2],
|
||||
[0.0, eon_d_focal_length, float(eon_d_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
@property
|
||||
def intrinsics_inv(self):
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
return np.linalg.inv(self.intrinsics)
|
||||
|
||||
tici_fcam_intrinsics = np.array([
|
||||
[tici_f_focal_length, 0.0, float(tici_f_frame_size[0])/2],
|
||||
[0.0, tici_f_focal_length, float(tici_f_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
@dataclass(frozen=True)
|
||||
class _NoneCameraConfig(CameraConfig):
|
||||
width: int = 0
|
||||
height: int = 0
|
||||
focal_length: float = 0
|
||||
|
||||
tici_dcam_intrinsics = np.array([
|
||||
[tici_d_focal_length, 0.0, float(tici_d_frame_size[0])/2],
|
||||
[0.0, tici_d_focal_length, float(tici_d_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
@dataclass(frozen=True)
|
||||
class DeviceCameraConfig:
|
||||
fcam: CameraConfig
|
||||
dcam: CameraConfig
|
||||
ecam: CameraConfig
|
||||
|
||||
tici_ecam_intrinsics = tici_dcam_intrinsics
|
||||
def all_cams(self):
|
||||
for cam in ['fcam', 'dcam', 'ecam']:
|
||||
if not isinstance(getattr(self, cam), _NoneCameraConfig):
|
||||
yield cam, getattr(self, cam)
|
||||
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
eon_fcam_intrinsics_inv = np.linalg.inv(eon_fcam_intrinsics)
|
||||
eon_intrinsics_inv = eon_fcam_intrinsics_inv # xx
|
||||
_ar_ox_fisheye = CameraConfig(1928, 1208, 567.0) # focal length probably wrong? magnification is not consistent across frame
|
||||
_os_fisheye = CameraConfig(2688, 1520, 567.0 / 2 * 3)
|
||||
_ar_ox_config = DeviceCameraConfig(CameraConfig(1928, 1208, 2648.0), _ar_ox_fisheye, _ar_ox_fisheye)
|
||||
_os_config = DeviceCameraConfig(CameraConfig(2688, 1520, 2648.0 * 2 / 3), _os_fisheye, _os_fisheye)
|
||||
_neo_config = DeviceCameraConfig(CameraConfig(1164, 874, 910.0), CameraConfig(816, 612, 650.0), _NoneCameraConfig())
|
||||
|
||||
tici_fcam_intrinsics_inv = np.linalg.inv(tici_fcam_intrinsics)
|
||||
tici_ecam_intrinsics_inv = np.linalg.inv(tici_ecam_intrinsics)
|
||||
DEVICE_CAMERAS = {
|
||||
# A "device camera" is defined by a device type and sensor
|
||||
|
||||
# sensor type was never set on eon/neo/two
|
||||
("neo", "unknown"): _neo_config,
|
||||
# unknown here is AR0231, field was added with OX03C10 support
|
||||
("tici", "unknown"): _ar_ox_config,
|
||||
|
||||
FULL_FRAME_SIZE = tici_f_frame_size
|
||||
FOCAL = tici_f_focal_length
|
||||
fcam_intrinsics = tici_fcam_intrinsics
|
||||
|
||||
W, H = FULL_FRAME_SIZE[0], FULL_FRAME_SIZE[1]
|
||||
# before deviceState.deviceType was set, assume tici AR config
|
||||
("unknown", "ar0231"): _ar_ox_config,
|
||||
("unknown", "ox03c10"): _ar_ox_config,
|
||||
|
||||
# simulator (emulates a tici)
|
||||
("pc", "unknown"): _ar_ox_config,
|
||||
}
|
||||
prods = itertools.product(('tici', 'tizi', 'mici'), (('ar0231', _ar_ox_config), ('ox03c10', _ar_ox_config), ('os04c10', _os_config)))
|
||||
DEVICE_CAMERAS.update({(d, c[0]): c[1] for d, c in prods})
|
||||
|
||||
# device/mesh : x->forward, y-> right, z->down
|
||||
# view : x->right, y->down, z->forward
|
||||
@@ -93,7 +112,7 @@ def roll_from_ke(m):
|
||||
-(m[0, 0] - m[0, 1] * m[2, 0] / m[2, 1]))
|
||||
|
||||
|
||||
def normalize(img_pts, intrinsics=fcam_intrinsics):
|
||||
def normalize(img_pts, intrinsics):
|
||||
# normalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
intrinsics_inv = np.linalg.inv(intrinsics)
|
||||
@@ -106,7 +125,7 @@ def normalize(img_pts, intrinsics=fcam_intrinsics):
|
||||
return img_pts_normalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def denormalize(img_pts, intrinsics=fcam_intrinsics, width=np.inf, height=np.inf):
|
||||
def denormalize(img_pts, intrinsics, width=np.inf, height=np.inf):
|
||||
# denormalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
img_pts = np.array(img_pts)
|
||||
@@ -123,7 +142,7 @@ def denormalize(img_pts, intrinsics=fcam_intrinsics, width=np.inf, height=np.inf
|
||||
return img_pts_denormalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def get_calib_from_vp(vp, intrinsics=fcam_intrinsics):
|
||||
def get_calib_from_vp(vp, intrinsics):
|
||||
vp_norm = normalize(vp, intrinsics)
|
||||
yaw_calib = np.arctan(vp_norm[0])
|
||||
pitch_calib = -np.arctan(vp_norm[1]*np.cos(yaw_calib))
|
||||
|
||||
100
common/transformations/coordinates.cc
Normal file
100
common/transformations/coordinates.cc
Normal file
@@ -0,0 +1,100 @@
|
||||
#define _USE_MATH_DEFINES
|
||||
|
||||
#include "common/transformations/coordinates.hpp"
|
||||
|
||||
#include <iostream>
|
||||
#include <cmath>
|
||||
#include <eigen3/Eigen/Dense>
|
||||
|
||||
double a = 6378137; // lgtm [cpp/short-global-name]
|
||||
double b = 6356752.3142; // lgtm [cpp/short-global-name]
|
||||
double esq = 6.69437999014 * 0.001; // lgtm [cpp/short-global-name]
|
||||
double e1sq = 6.73949674228 * 0.001;
|
||||
|
||||
|
||||
static Geodetic to_degrees(Geodetic geodetic){
|
||||
geodetic.lat = RAD2DEG(geodetic.lat);
|
||||
geodetic.lon = RAD2DEG(geodetic.lon);
|
||||
return geodetic;
|
||||
}
|
||||
|
||||
static Geodetic to_radians(Geodetic geodetic){
|
||||
geodetic.lat = DEG2RAD(geodetic.lat);
|
||||
geodetic.lon = DEG2RAD(geodetic.lon);
|
||||
return geodetic;
|
||||
}
|
||||
|
||||
|
||||
ECEF geodetic2ecef(Geodetic g){
|
||||
g = to_radians(g);
|
||||
double xi = sqrt(1.0 - esq * pow(sin(g.lat), 2));
|
||||
double x = (a / xi + g.alt) * cos(g.lat) * cos(g.lon);
|
||||
double y = (a / xi + g.alt) * cos(g.lat) * sin(g.lon);
|
||||
double z = (a / xi * (1.0 - esq) + g.alt) * sin(g.lat);
|
||||
return {x, y, z};
|
||||
}
|
||||
|
||||
Geodetic ecef2geodetic(ECEF e){
|
||||
// Convert from ECEF to geodetic using Ferrari's methods
|
||||
// https://en.wikipedia.org/wiki/Geographic_coordinate_conversion#Ferrari.27s_solution
|
||||
double x = e.x;
|
||||
double y = e.y;
|
||||
double z = e.z;
|
||||
|
||||
double r = sqrt(x * x + y * y);
|
||||
double Esq = a * a - b * b;
|
||||
double F = 54 * b * b * z * z;
|
||||
double G = r * r + (1 - esq) * z * z - esq * Esq;
|
||||
double C = (esq * esq * F * r * r) / (pow(G, 3));
|
||||
double S = cbrt(1 + C + sqrt(C * C + 2 * C));
|
||||
double P = F / (3 * pow((S + 1 / S + 1), 2) * G * G);
|
||||
double Q = sqrt(1 + 2 * esq * esq * P);
|
||||
double r_0 = -(P * esq * r) / (1 + Q) + sqrt(0.5 * a * a*(1 + 1.0 / Q) - P * (1 - esq) * z * z / (Q * (1 + Q)) - 0.5 * P * r * r);
|
||||
double U = sqrt(pow((r - esq * r_0), 2) + z * z);
|
||||
double V = sqrt(pow((r - esq * r_0), 2) + (1 - esq) * z * z);
|
||||
double Z_0 = b * b * z / (a * V);
|
||||
double h = U * (1 - b * b / (a * V));
|
||||
|
||||
double lat = atan((z + e1sq * Z_0) / r);
|
||||
double lon = atan2(y, x);
|
||||
|
||||
return to_degrees({lat, lon, h});
|
||||
}
|
||||
|
||||
LocalCoord::LocalCoord(Geodetic g, ECEF e){
|
||||
init_ecef << e.x, e.y, e.z;
|
||||
|
||||
g = to_radians(g);
|
||||
|
||||
ned2ecef_matrix <<
|
||||
-sin(g.lat)*cos(g.lon), -sin(g.lon), -cos(g.lat)*cos(g.lon),
|
||||
-sin(g.lat)*sin(g.lon), cos(g.lon), -cos(g.lat)*sin(g.lon),
|
||||
cos(g.lat), 0, -sin(g.lat);
|
||||
ecef2ned_matrix = ned2ecef_matrix.transpose();
|
||||
}
|
||||
|
||||
NED LocalCoord::ecef2ned(ECEF e) {
|
||||
Eigen::Vector3d ecef;
|
||||
ecef << e.x, e.y, e.z;
|
||||
|
||||
Eigen::Vector3d ned = (ecef2ned_matrix * (ecef - init_ecef));
|
||||
return {ned[0], ned[1], ned[2]};
|
||||
}
|
||||
|
||||
ECEF LocalCoord::ned2ecef(NED n) {
|
||||
Eigen::Vector3d ned;
|
||||
ned << n.n, n.e, n.d;
|
||||
|
||||
Eigen::Vector3d ecef = (ned2ecef_matrix * ned) + init_ecef;
|
||||
return {ecef[0], ecef[1], ecef[2]};
|
||||
}
|
||||
|
||||
NED LocalCoord::geodetic2ned(Geodetic g) {
|
||||
ECEF e = ::geodetic2ecef(g);
|
||||
return ecef2ned(e);
|
||||
}
|
||||
|
||||
Geodetic LocalCoord::ned2geodetic(NED n){
|
||||
ECEF e = ned2ecef(n);
|
||||
return ::ecef2geodetic(e);
|
||||
}
|
||||
@@ -1,19 +1,11 @@
|
||||
import numpy as np
|
||||
|
||||
from openpilot.common.transformations.orientation import rot_from_euler
|
||||
from openpilot.common.transformations.camera import (
|
||||
FULL_FRAME_SIZE, get_view_frame_from_calib_frame, view_frame_from_device_frame,
|
||||
eon_fcam_intrinsics, tici_ecam_intrinsics, tici_fcam_intrinsics)
|
||||
from openpilot.common.transformations.camera import get_view_frame_from_calib_frame, view_frame_from_device_frame
|
||||
|
||||
# segnet
|
||||
SEGNET_SIZE = (512, 384)
|
||||
|
||||
def get_segnet_frame_from_camera_frame(segnet_size=SEGNET_SIZE, full_frame_size=FULL_FRAME_SIZE):
|
||||
return np.array([[float(segnet_size[0]) / full_frame_size[0], 0.0],
|
||||
[0.0, float(segnet_size[1]) / full_frame_size[1]]])
|
||||
segnet_frame_from_camera_frame = get_segnet_frame_from_camera_frame() # xx
|
||||
|
||||
|
||||
# MED model
|
||||
MEDMODEL_INPUT_SIZE = (512, 256)
|
||||
MEDMODEL_YUV_SIZE = (MEDMODEL_INPUT_SIZE[0], MEDMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
@@ -63,16 +55,9 @@ calib_from_medmodel = np.linalg.inv(medmodel_frame_from_calib_frame[:, :3])
|
||||
calib_from_sbigmodel = np.linalg.inv(sbigmodel_frame_from_calib_frame[:, :3])
|
||||
|
||||
# This function is verified to give similar results to xx.uncommon.utils.transform_img
|
||||
def get_warp_matrix(device_from_calib_euler: np.ndarray, wide_camera: bool = False, bigmodel_frame: bool = False, tici: bool = True) -> np.ndarray:
|
||||
if tici and wide_camera:
|
||||
cam_intrinsics = tici_ecam_intrinsics
|
||||
elif tici:
|
||||
cam_intrinsics = tici_fcam_intrinsics
|
||||
else:
|
||||
cam_intrinsics = eon_fcam_intrinsics
|
||||
|
||||
def get_warp_matrix(device_from_calib_euler: np.ndarray, intrinsics: np.ndarray, bigmodel_frame: bool = False) -> np.ndarray:
|
||||
calib_from_model = calib_from_sbigmodel if bigmodel_frame else calib_from_medmodel
|
||||
device_from_calib = rot_from_euler(device_from_calib_euler)
|
||||
camera_from_calib = cam_intrinsics @ view_frame_from_device_frame @ device_from_calib
|
||||
camera_from_calib = intrinsics @ view_frame_from_device_frame @ device_from_calib
|
||||
warp_matrix: np.ndarray = camera_from_calib @ calib_from_model
|
||||
return warp_matrix
|
||||
|
||||
144
common/transformations/orientation.cc
Normal file
144
common/transformations/orientation.cc
Normal file
@@ -0,0 +1,144 @@
|
||||
#define _USE_MATH_DEFINES
|
||||
|
||||
#include <iostream>
|
||||
#include <cmath>
|
||||
#include <eigen3/Eigen/Dense>
|
||||
|
||||
#include "common/transformations/orientation.hpp"
|
||||
#include "common/transformations/coordinates.hpp"
|
||||
|
||||
Eigen::Quaterniond ensure_unique(Eigen::Quaterniond quat){
|
||||
if (quat.w() > 0){
|
||||
return quat;
|
||||
} else {
|
||||
return Eigen::Quaterniond(-quat.w(), -quat.x(), -quat.y(), -quat.z());
|
||||
}
|
||||
}
|
||||
|
||||
Eigen::Quaterniond euler2quat(Eigen::Vector3d euler){
|
||||
Eigen::Quaterniond q;
|
||||
|
||||
q = Eigen::AngleAxisd(euler(2), Eigen::Vector3d::UnitZ())
|
||||
* Eigen::AngleAxisd(euler(1), Eigen::Vector3d::UnitY())
|
||||
* Eigen::AngleAxisd(euler(0), Eigen::Vector3d::UnitX());
|
||||
return ensure_unique(q);
|
||||
}
|
||||
|
||||
|
||||
Eigen::Vector3d quat2euler(Eigen::Quaterniond quat){
|
||||
// TODO: switch to eigen implementation if the range of the Euler angles doesn't matter anymore
|
||||
// Eigen::Vector3d euler = quat.toRotationMatrix().eulerAngles(2, 1, 0);
|
||||
// return {euler(2), euler(1), euler(0)};
|
||||
double gamma = atan2(2 * (quat.w() * quat.x() + quat.y() * quat.z()), 1 - 2 * (quat.x()*quat.x() + quat.y()*quat.y()));
|
||||
double asin_arg_clipped = std::clamp(2 * (quat.w() * quat.y() - quat.z() * quat.x()), -1.0, 1.0);
|
||||
double theta = asin(asin_arg_clipped);
|
||||
double psi = atan2(2 * (quat.w() * quat.z() + quat.x() * quat.y()), 1 - 2 * (quat.y()*quat.y() + quat.z()*quat.z()));
|
||||
return {gamma, theta, psi};
|
||||
}
|
||||
|
||||
Eigen::Matrix3d quat2rot(Eigen::Quaterniond quat){
|
||||
return quat.toRotationMatrix();
|
||||
}
|
||||
|
||||
Eigen::Quaterniond rot2quat(const Eigen::Matrix3d &rot){
|
||||
return ensure_unique(Eigen::Quaterniond(rot));
|
||||
}
|
||||
|
||||
Eigen::Matrix3d euler2rot(Eigen::Vector3d euler){
|
||||
return quat2rot(euler2quat(euler));
|
||||
}
|
||||
|
||||
Eigen::Vector3d rot2euler(const Eigen::Matrix3d &rot){
|
||||
return quat2euler(rot2quat(rot));
|
||||
}
|
||||
|
||||
Eigen::Matrix3d rot_matrix(double roll, double pitch, double yaw){
|
||||
return euler2rot({roll, pitch, yaw});
|
||||
}
|
||||
|
||||
Eigen::Matrix3d rot(Eigen::Vector3d axis, double angle){
|
||||
Eigen::Quaterniond q;
|
||||
q = Eigen::AngleAxisd(angle, axis);
|
||||
return q.toRotationMatrix();
|
||||
}
|
||||
|
||||
|
||||
Eigen::Vector3d ecef_euler_from_ned(ECEF ecef_init, Eigen::Vector3d ned_pose) {
|
||||
/*
|
||||
Using Rotations to Build Aerospace Coordinate Systems
|
||||
Don Koks
|
||||
https://apps.dtic.mil/dtic/tr/fulltext/u2/a484864.pdf
|
||||
*/
|
||||
LocalCoord converter = LocalCoord(ecef_init);
|
||||
Eigen::Vector3d zero = ecef_init.to_vector();
|
||||
|
||||
Eigen::Vector3d x0 = converter.ned2ecef({1, 0, 0}).to_vector() - zero;
|
||||
Eigen::Vector3d y0 = converter.ned2ecef({0, 1, 0}).to_vector() - zero;
|
||||
Eigen::Vector3d z0 = converter.ned2ecef({0, 0, 1}).to_vector() - zero;
|
||||
|
||||
Eigen::Vector3d x1 = rot(z0, ned_pose(2)) * x0;
|
||||
Eigen::Vector3d y1 = rot(z0, ned_pose(2)) * y0;
|
||||
Eigen::Vector3d z1 = rot(z0, ned_pose(2)) * z0;
|
||||
|
||||
Eigen::Vector3d x2 = rot(y1, ned_pose(1)) * x1;
|
||||
Eigen::Vector3d y2 = rot(y1, ned_pose(1)) * y1;
|
||||
Eigen::Vector3d z2 = rot(y1, ned_pose(1)) * z1;
|
||||
|
||||
Eigen::Vector3d x3 = rot(x2, ned_pose(0)) * x2;
|
||||
Eigen::Vector3d y3 = rot(x2, ned_pose(0)) * y2;
|
||||
|
||||
|
||||
x0 = Eigen::Vector3d(1, 0, 0);
|
||||
y0 = Eigen::Vector3d(0, 1, 0);
|
||||
z0 = Eigen::Vector3d(0, 0, 1);
|
||||
|
||||
double psi = atan2(x3.dot(y0), x3.dot(x0));
|
||||
double theta = atan2(-x3.dot(z0), sqrt(pow(x3.dot(x0), 2) + pow(x3.dot(y0), 2)));
|
||||
|
||||
y2 = rot(z0, psi) * y0;
|
||||
z2 = rot(y2, theta) * z0;
|
||||
|
||||
double phi = atan2(y3.dot(z2), y3.dot(y2));
|
||||
|
||||
return {phi, theta, psi};
|
||||
}
|
||||
|
||||
Eigen::Vector3d ned_euler_from_ecef(ECEF ecef_init, Eigen::Vector3d ecef_pose){
|
||||
/*
|
||||
Using Rotations to Build Aerospace Coordinate Systems
|
||||
Don Koks
|
||||
https://apps.dtic.mil/dtic/tr/fulltext/u2/a484864.pdf
|
||||
*/
|
||||
LocalCoord converter = LocalCoord(ecef_init);
|
||||
|
||||
Eigen::Vector3d x0 = Eigen::Vector3d(1, 0, 0);
|
||||
Eigen::Vector3d y0 = Eigen::Vector3d(0, 1, 0);
|
||||
Eigen::Vector3d z0 = Eigen::Vector3d(0, 0, 1);
|
||||
|
||||
Eigen::Vector3d x1 = rot(z0, ecef_pose(2)) * x0;
|
||||
Eigen::Vector3d y1 = rot(z0, ecef_pose(2)) * y0;
|
||||
Eigen::Vector3d z1 = rot(z0, ecef_pose(2)) * z0;
|
||||
|
||||
Eigen::Vector3d x2 = rot(y1, ecef_pose(1)) * x1;
|
||||
Eigen::Vector3d y2 = rot(y1, ecef_pose(1)) * y1;
|
||||
Eigen::Vector3d z2 = rot(y1, ecef_pose(1)) * z1;
|
||||
|
||||
Eigen::Vector3d x3 = rot(x2, ecef_pose(0)) * x2;
|
||||
Eigen::Vector3d y3 = rot(x2, ecef_pose(0)) * y2;
|
||||
|
||||
Eigen::Vector3d zero = ecef_init.to_vector();
|
||||
x0 = converter.ned2ecef({1, 0, 0}).to_vector() - zero;
|
||||
y0 = converter.ned2ecef({0, 1, 0}).to_vector() - zero;
|
||||
z0 = converter.ned2ecef({0, 0, 1}).to_vector() - zero;
|
||||
|
||||
double psi = atan2(x3.dot(y0), x3.dot(x0));
|
||||
double theta = atan2(-x3.dot(z0), sqrt(pow(x3.dot(x0), 2) + pow(x3.dot(y0), 2)));
|
||||
|
||||
y2 = rot(z0, psi) * y0;
|
||||
z2 = rot(y2, theta) * z0;
|
||||
|
||||
double phi = atan2(y3.dot(z2), y3.dot(y2));
|
||||
|
||||
return {phi, theta, psi};
|
||||
}
|
||||
|
||||
@@ -1,5 +1,5 @@
|
||||
import numpy as np
|
||||
from typing import Callable
|
||||
from collections.abc import Callable
|
||||
|
||||
from openpilot.common.transformations.transformations import (ecef_euler_from_ned_single,
|
||||
euler2quat_single,
|
||||
|
||||
0
common/transformations/tests/__init__.py
Normal file
0
common/transformations/tests/__init__.py
Normal file
109
common/transformations/tests/test_coordinates.py
Normal file
109
common/transformations/tests/test_coordinates.py
Normal file
@@ -0,0 +1,109 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
import openpilot.common.transformations.coordinates as coord
|
||||
|
||||
geodetic_positions = np.array([[37.7610403, -122.4778699, 115],
|
||||
[27.4840915, -68.5867592, 2380],
|
||||
[32.4916858, -113.652821, -6],
|
||||
[15.1392514, 103.6976037, 24],
|
||||
[24.2302229, 44.2835412, 1650]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ecef_positions_offset = np.array([[-2711004.46961115, -4259099.33540613, 3884605.16002147],
|
||||
[ 2068074.30639499, -5273413.78835412, 2927012.48741131],
|
||||
[-2160344.53748176, -4932586.20092211, 3406636.2962545 ],
|
||||
[-1458211.98517094, 5983151.11161276, 1655077.02698447],
|
||||
[ 4167271.20055269, 4064398.22619263, 2602238.95265847]])
|
||||
|
||||
|
||||
ned_offsets = np.array([[78.722153649976391, 24.396208657446344, 60.343017506838436],
|
||||
[10.699003365155221, 37.319278617604269, 4.1084100025050407],
|
||||
[95.282646251726959, 61.266689955574428, -25.376506058505054],
|
||||
[68.535769283630003, -56.285970011848889, -100.54840137956515],
|
||||
[-33.066609321880179, 46.549821994306861, -84.062540548335591]])
|
||||
|
||||
ecef_init_batch = np.array([2068042.69652729, -5273435.40316622, 2927004.89190746])
|
||||
ecef_positions_offset_batch = np.array([[ 2068089.41454771, -5273434.46829148, 2927074.04783672],
|
||||
[ 2068103.31628647, -5273393.92275431, 2927102.08725987],
|
||||
[ 2068108.49939636, -5273359.27047121, 2927045.07091581],
|
||||
[ 2068075.12395611, -5273381.69432566, 2927041.08207992],
|
||||
[ 2068060.72033399, -5273430.6061505, 2927094.54928305]])
|
||||
|
||||
ned_offsets_batch = np.array([[ 53.88103168, 43.83445935, -46.27488057],
|
||||
[ 93.83378995, 71.57943024, -30.23113187],
|
||||
[ 57.26725796, 89.05602684, 23.02265814],
|
||||
[ 49.71775195, 49.79767572, 17.15351015],
|
||||
[ 78.56272609, 18.53100158, -43.25290759]])
|
||||
|
||||
|
||||
class TestNED(unittest.TestCase):
|
||||
def test_small_distances(self):
|
||||
start_geodetic = np.array([33.8042184, -117.888593, 0.0])
|
||||
local_coord = coord.LocalCoord.from_geodetic(start_geodetic)
|
||||
|
||||
start_ned = local_coord.geodetic2ned(start_geodetic)
|
||||
np.testing.assert_array_equal(start_ned, np.zeros(3,))
|
||||
|
||||
west_geodetic = start_geodetic + [0, -0.0005, 0]
|
||||
west_ned = local_coord.geodetic2ned(west_geodetic)
|
||||
self.assertLess(np.abs(west_ned[0]), 1e-3)
|
||||
self.assertLess(west_ned[1], 0)
|
||||
|
||||
southwest_geodetic = start_geodetic + [-0.0005, -0.002, 0]
|
||||
southwest_ned = local_coord.geodetic2ned(southwest_geodetic)
|
||||
self.assertLess(southwest_ned[0], 0)
|
||||
self.assertLess(southwest_ned[1], 0)
|
||||
|
||||
def test_ecef_geodetic(self):
|
||||
# testing single
|
||||
np.testing.assert_allclose(ecef_positions[0], coord.geodetic2ecef(geodetic_positions[0]), rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0, :2], coord.ecef2geodetic(ecef_positions[0])[:2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0, 2], coord.ecef2geodetic(ecef_positions[0])[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
np.testing.assert_allclose(geodetic_positions[:, :2], coord.ecef2geodetic(ecef_positions)[:, :2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[:, 2], coord.ecef2geodetic(ecef_positions)[:, 2], rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(ecef_positions, coord.geodetic2ecef(geodetic_positions), rtol=1e-9)
|
||||
|
||||
|
||||
def test_ned(self):
|
||||
for ecef_pos in ecef_positions:
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
ecef_pos_moved = ecef_pos + [25, -25, 25]
|
||||
ecef_pos_moved_double_converted = converter.ned2ecef(converter.ecef2ned(ecef_pos_moved))
|
||||
np.testing.assert_allclose(ecef_pos_moved, ecef_pos_moved_double_converted, rtol=1e-9)
|
||||
|
||||
for geo_pos in geodetic_positions:
|
||||
converter = coord.LocalCoord.from_geodetic(geo_pos)
|
||||
geo_pos_moved = geo_pos + np.array([0, 0, 10])
|
||||
geo_pos_double_converted_moved = converter.ned2geodetic(converter.geodetic2ned(geo_pos) + np.array([0, 0, -10]))
|
||||
np.testing.assert_allclose(geo_pos_moved[:2], geo_pos_double_converted_moved[:2], rtol=1e-9, atol=1e-6)
|
||||
np.testing.assert_allclose(geo_pos_moved[2], geo_pos_double_converted_moved[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_saved_results(self):
|
||||
for i, ecef_pos in enumerate(ecef_positions):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets[i]),
|
||||
ecef_positions_offset[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset[i]),
|
||||
ned_offsets[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_batch(self):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_init_batch)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset_batch),
|
||||
ned_offsets_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets_batch),
|
||||
ecef_positions_offset_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
68
common/transformations/tests/test_orientation.py
Normal file
68
common/transformations/tests/test_orientation.py
Normal file
@@ -0,0 +1,68 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
from openpilot.common.transformations.orientation import euler2quat, quat2euler, euler2rot, rot2euler, \
|
||||
rot2quat, quat2rot, \
|
||||
ned_euler_from_ecef
|
||||
|
||||
eulers = np.array([[ 1.46520501, 2.78688383, 2.92780854],
|
||||
[ 4.86909526, 3.60618161, 4.30648981],
|
||||
[ 3.72175965, 2.68763705, 5.43895988],
|
||||
[ 5.92306687, 5.69573614, 0.81100357],
|
||||
[ 0.67838374, 5.02402037, 2.47106426]])
|
||||
|
||||
quats = np.array([[ 0.66855182, -0.71500939, 0.19539353, 0.06017818],
|
||||
[ 0.43163717, 0.70013301, 0.28209145, 0.49389021],
|
||||
[ 0.44121991, -0.08252646, 0.34257534, 0.82532207],
|
||||
[ 0.88578382, -0.04515356, -0.32936046, 0.32383617],
|
||||
[ 0.06578165, 0.61282835, 0.07126891, 0.78424163]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ned_eulers = np.array([[ 0.46806039, -0.4881889 , 1.65697808],
|
||||
[-2.14525969, -0.36533066, 0.73813479],
|
||||
[-1.39523364, -0.58540761, -1.77376356],
|
||||
[-1.84220435, 0.61828016, -1.03310421],
|
||||
[ 2.50450101, 0.36304151, 0.33136365]])
|
||||
|
||||
|
||||
class TestOrientation(unittest.TestCase):
|
||||
def test_quat_euler(self):
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(eul), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(quats[i])), rtol=1e-6)
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(list(eul)), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(list(quats[i]))), rtol=1e-6)
|
||||
np.testing.assert_allclose(quats, euler2quat(eulers), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, euler2quat(quat2euler(quats)), rtol=1e-6)
|
||||
|
||||
def test_rot_euler(self):
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(eul))), rtol=1e-7)
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(list(eul)))), rtol=1e-7)
|
||||
np.testing.assert_allclose(euler2quat(eulers), euler2quat(rot2euler(euler2rot(eulers))), rtol=1e-7)
|
||||
|
||||
def test_rot_quat(self):
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(quat)), rtol=1e-7)
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(list(quat))), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, rot2quat(quat2rot(quats)), rtol=1e-7)
|
||||
|
||||
def test_euler_ned(self):
|
||||
for i in range(len(eulers)):
|
||||
np.testing.assert_allclose(ned_eulers[i], ned_euler_from_ecef(ecef_positions[i], eulers[i]), rtol=1e-7)
|
||||
#np.testing.assert_allclose(eulers[i], ecef_euler_from_ned(ecef_positions[i], ned_eulers[i]), rtol=1e-7)
|
||||
# np.testing.assert_allclose(ned_eulers, ned_euler_from_ecef(ecef_positions, eulers), rtol=1e-7)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
File diff suppressed because it is too large
Load Diff
Binary file not shown.
295
common/util.cc
Normal file
295
common/util.cc
Normal file
@@ -0,0 +1,295 @@
|
||||
#include "common/util.h"
|
||||
|
||||
#include <sys/ioctl.h>
|
||||
#include <sys/stat.h>
|
||||
#include <sys/resource.h>
|
||||
|
||||
#include <cassert>
|
||||
#include <cerrno>
|
||||
#include <cstring>
|
||||
#include <dirent.h>
|
||||
#include <fstream>
|
||||
#include <iomanip>
|
||||
#include <random>
|
||||
#include <sstream>
|
||||
|
||||
#ifdef __linux__
|
||||
#include <sys/prctl.h>
|
||||
#include <sys/syscall.h>
|
||||
#ifndef __USE_GNU
|
||||
#define __USE_GNU
|
||||
#endif
|
||||
#include <sched.h>
|
||||
#endif // __linux__
|
||||
|
||||
namespace util {
|
||||
|
||||
void set_thread_name(const char* name) {
|
||||
#ifdef __linux__
|
||||
// pthread_setname_np is dumb (fails instead of truncates)
|
||||
prctl(PR_SET_NAME, (unsigned long)name, 0, 0, 0);
|
||||
#endif
|
||||
}
|
||||
|
||||
int set_realtime_priority(int level) {
|
||||
#ifdef __linux__
|
||||
long tid = syscall(SYS_gettid);
|
||||
|
||||
// should match python using chrt
|
||||
struct sched_param sa;
|
||||
memset(&sa, 0, sizeof(sa));
|
||||
sa.sched_priority = level;
|
||||
return sched_setscheduler(tid, SCHED_FIFO, &sa);
|
||||
#else
|
||||
return -1;
|
||||
#endif
|
||||
}
|
||||
|
||||
int set_core_affinity(std::vector<int> cores) {
|
||||
#ifdef __linux__
|
||||
long tid = syscall(SYS_gettid);
|
||||
cpu_set_t cpu;
|
||||
|
||||
CPU_ZERO(&cpu);
|
||||
for (const int n : cores) {
|
||||
CPU_SET(n, &cpu);
|
||||
}
|
||||
return sched_setaffinity(tid, sizeof(cpu), &cpu);
|
||||
#else
|
||||
return -1;
|
||||
#endif
|
||||
}
|
||||
|
||||
int set_file_descriptor_limit(uint64_t limit_val) {
|
||||
struct rlimit limit;
|
||||
int status;
|
||||
|
||||
if ((status = getrlimit(RLIMIT_NOFILE, &limit)) < 0)
|
||||
return status;
|
||||
|
||||
limit.rlim_cur = limit_val;
|
||||
if ((status = setrlimit(RLIMIT_NOFILE, &limit)) < 0)
|
||||
return status;
|
||||
|
||||
return 0;
|
||||
}
|
||||
|
||||
std::string read_file(const std::string& fn) {
|
||||
std::ifstream f(fn, std::ios::binary | std::ios::in);
|
||||
if (f.is_open()) {
|
||||
f.seekg(0, std::ios::end);
|
||||
int size = f.tellg();
|
||||
if (f.good() && size > 0) {
|
||||
std::string result(size, '\0');
|
||||
f.seekg(0, std::ios::beg);
|
||||
f.read(result.data(), size);
|
||||
// return either good() or has reached end-of-file (e.g. /sys/power/wakeup_count)
|
||||
if (f.good() || f.eof()) {
|
||||
result.resize(f.gcount());
|
||||
return result;
|
||||
}
|
||||
}
|
||||
// fallback for files created on read, e.g. procfs
|
||||
std::stringstream buffer;
|
||||
buffer << f.rdbuf();
|
||||
return buffer.str();
|
||||
}
|
||||
return std::string();
|
||||
}
|
||||
|
||||
std::map<std::string, std::string> read_files_in_dir(const std::string &path) {
|
||||
std::map<std::string, std::string> ret;
|
||||
DIR *d = opendir(path.c_str());
|
||||
if (!d) return ret;
|
||||
|
||||
struct dirent *de = NULL;
|
||||
while ((de = readdir(d))) {
|
||||
if (de->d_type != DT_DIR) {
|
||||
ret[de->d_name] = util::read_file(path + "/" + de->d_name);
|
||||
}
|
||||
}
|
||||
|
||||
closedir(d);
|
||||
return ret;
|
||||
}
|
||||
|
||||
int write_file(const char* path, const void* data, size_t size, int flags, mode_t mode) {
|
||||
int fd = HANDLE_EINTR(open(path, flags, mode));
|
||||
if (fd == -1) {
|
||||
return -1;
|
||||
}
|
||||
ssize_t n = HANDLE_EINTR(write(fd, data, size));
|
||||
close(fd);
|
||||
return (n >= 0 && (size_t)n == size) ? 0 : -1;
|
||||
}
|
||||
|
||||
FILE* safe_fopen(const char* filename, const char* mode) {
|
||||
FILE* fp = NULL;
|
||||
do {
|
||||
fp = fopen(filename, mode);
|
||||
} while ((nullptr == fp) && (errno == EINTR));
|
||||
return fp;
|
||||
}
|
||||
|
||||
size_t safe_fwrite(const void* ptr, size_t size, size_t count, FILE* stream) {
|
||||
size_t written = 0;
|
||||
do {
|
||||
size_t ret = ::fwrite((void*)((char *)ptr + written * size), size, count - written, stream);
|
||||
if (ret == 0 && errno != EINTR) break;
|
||||
written += ret;
|
||||
} while (written != count);
|
||||
return written;
|
||||
}
|
||||
|
||||
int safe_fflush(FILE *stream) {
|
||||
int ret = EOF;
|
||||
do {
|
||||
ret = fflush(stream);
|
||||
} while ((EOF == ret) && (errno == EINTR));
|
||||
return ret;
|
||||
}
|
||||
|
||||
int safe_ioctl(int fd, unsigned long request, void *argp) {
|
||||
int ret;
|
||||
do {
|
||||
ret = ioctl(fd, request, argp);
|
||||
} while ((ret == -1) && (errno == EINTR));
|
||||
return ret;
|
||||
}
|
||||
|
||||
std::string readlink(const std::string &path) {
|
||||
char buff[4096];
|
||||
ssize_t len = ::readlink(path.c_str(), buff, sizeof(buff)-1);
|
||||
if (len != -1) {
|
||||
buff[len] = '\0';
|
||||
return std::string(buff);
|
||||
}
|
||||
return "";
|
||||
}
|
||||
|
||||
bool file_exists(const std::string& fn) {
|
||||
struct stat st = {};
|
||||
return stat(fn.c_str(), &st) != -1;
|
||||
}
|
||||
|
||||
static bool createDirectory(std::string dir, mode_t mode) {
|
||||
auto verify_dir = [](const std::string& dir) -> bool {
|
||||
struct stat st = {};
|
||||
return (stat(dir.c_str(), &st) == 0 && (st.st_mode & S_IFMT) == S_IFDIR);
|
||||
};
|
||||
// remove trailing /'s
|
||||
while (dir.size() > 1 && dir.back() == '/') {
|
||||
dir.pop_back();
|
||||
}
|
||||
// try to mkdir this directory
|
||||
if (mkdir(dir.c_str(), mode) == 0) return true;
|
||||
if (errno == EEXIST) return verify_dir(dir);
|
||||
if (errno != ENOENT) return false;
|
||||
|
||||
// mkdir failed because the parent dir doesn't exist, so try to create it
|
||||
size_t slash = dir.rfind('/');
|
||||
if ((slash == std::string::npos || slash < 1) ||
|
||||
!createDirectory(dir.substr(0, slash), mode)) {
|
||||
return false;
|
||||
}
|
||||
|
||||
// try again
|
||||
if (mkdir(dir.c_str(), mode) == 0) return true;
|
||||
return errno == EEXIST && verify_dir(dir);
|
||||
}
|
||||
|
||||
bool create_directories(const std::string& dir, mode_t mode) {
|
||||
if (dir.empty()) return false;
|
||||
return createDirectory(dir, mode);
|
||||
}
|
||||
|
||||
std::string getenv(const char* key, std::string default_val) {
|
||||
const char* val = ::getenv(key);
|
||||
return val ? val : default_val;
|
||||
}
|
||||
|
||||
int getenv(const char* key, int default_val) {
|
||||
const char* val = ::getenv(key);
|
||||
return val ? atoi(val) : default_val;
|
||||
}
|
||||
|
||||
float getenv(const char* key, float default_val) {
|
||||
const char* val = ::getenv(key);
|
||||
return val ? atof(val) : default_val;
|
||||
}
|
||||
|
||||
std::string hexdump(const uint8_t* in, const size_t size) {
|
||||
std::stringstream ss;
|
||||
ss << std::hex << std::setfill('0');
|
||||
for (size_t i = 0; i < size; i++) {
|
||||
ss << std::setw(2) << static_cast<unsigned int>(in[i]);
|
||||
}
|
||||
return ss.str();
|
||||
}
|
||||
|
||||
int random_int(int min, int max) {
|
||||
std::random_device dev;
|
||||
std::mt19937 rng(dev());
|
||||
std::uniform_int_distribution<std::mt19937::result_type> dist(min, max);
|
||||
return dist(rng);
|
||||
}
|
||||
|
||||
std::string random_string(std::string::size_type length) {
|
||||
const std::string chrs = "0123456789abcdefghijklmnopqrstuvwxyzABCDEFGHIJKLMNOPQRSTUVWXYZ";
|
||||
std::mt19937 rg{std::random_device{}()};
|
||||
std::uniform_int_distribution<std::string::size_type> pick(0, chrs.length() - 1);
|
||||
std::string s;
|
||||
s.reserve(length);
|
||||
while (length--) {
|
||||
s += chrs[pick(rg)];
|
||||
}
|
||||
return s;
|
||||
}
|
||||
|
||||
std::string dir_name(std::string const &path) {
|
||||
size_t pos = path.find_last_of("/");
|
||||
if (pos == std::string::npos) return "";
|
||||
return path.substr(0, pos);
|
||||
}
|
||||
|
||||
bool starts_with(const std::string &s1, const std::string &s2) {
|
||||
return strncmp(s1.c_str(), s2.c_str(), s2.size()) == 0;
|
||||
}
|
||||
|
||||
bool ends_with(const std::string &s1, const std::string &s2) {
|
||||
return strcmp(s1.c_str() + (s1.size() - s2.size()), s2.c_str()) == 0;
|
||||
}
|
||||
|
||||
std::string check_output(const std::string& command) {
|
||||
char buffer[128];
|
||||
std::string result;
|
||||
std::unique_ptr<FILE, decltype(&pclose)> pipe(popen(command.c_str(), "r"), pclose);
|
||||
|
||||
if (!pipe) {
|
||||
return "";
|
||||
}
|
||||
|
||||
while (fgets(buffer, std::size(buffer), pipe.get()) != nullptr) {
|
||||
result += std::string(buffer);
|
||||
}
|
||||
|
||||
return result;
|
||||
}
|
||||
|
||||
struct tm get_time() {
|
||||
time_t rawtime;
|
||||
time(&rawtime);
|
||||
|
||||
struct tm sys_time;
|
||||
gmtime_r(&rawtime, &sys_time);
|
||||
|
||||
return sys_time;
|
||||
}
|
||||
|
||||
bool time_valid(struct tm sys_time) {
|
||||
int year = 1900 + sys_time.tm_year;
|
||||
int month = 1 + sys_time.tm_mon;
|
||||
return (year > 2023) || (year == 2023 && month >= 6);
|
||||
}
|
||||
|
||||
} // namespace util
|
||||
184
common/util.h
Normal file
184
common/util.h
Normal file
@@ -0,0 +1,184 @@
|
||||
#pragma once
|
||||
|
||||
#include <fcntl.h>
|
||||
#include <sys/stat.h>
|
||||
#include <unistd.h>
|
||||
|
||||
#include <algorithm>
|
||||
#include <atomic>
|
||||
#include <chrono>
|
||||
#include <csignal>
|
||||
#include <ctime>
|
||||
#include <map>
|
||||
#include <memory>
|
||||
#include <mutex>
|
||||
#include <string>
|
||||
#include <thread>
|
||||
#include <vector>
|
||||
|
||||
// keep trying if x gets interrupted by a signal
|
||||
#define HANDLE_EINTR(x) \
|
||||
({ \
|
||||
decltype(x) ret_; \
|
||||
int try_cnt = 0; \
|
||||
do { \
|
||||
ret_ = (x); \
|
||||
} while (ret_ == -1 && errno == EINTR && try_cnt++ < 100); \
|
||||
ret_; \
|
||||
})
|
||||
|
||||
#ifndef sighandler_t
|
||||
typedef void (*sighandler_t)(int sig);
|
||||
#endif
|
||||
|
||||
const double MILE_TO_KM = 1.609344;
|
||||
const double KM_TO_MILE = 1. / MILE_TO_KM;
|
||||
const double MS_TO_KPH = 3.6;
|
||||
const double MS_TO_MPH = MS_TO_KPH * KM_TO_MILE;
|
||||
const double METER_TO_MILE = KM_TO_MILE / 1000.0;
|
||||
const double METER_TO_FOOT = 3.28084;
|
||||
const double FOOT_TO_METER = 1 / METER_TO_FOOT;
|
||||
const double CM_TO_INCH = 1 / 2.54;
|
||||
const double INCH_TO_CM = 1 / CM_TO_INCH;
|
||||
|
||||
namespace util {
|
||||
|
||||
void set_thread_name(const char* name);
|
||||
int set_realtime_priority(int level);
|
||||
int set_core_affinity(std::vector<int> cores);
|
||||
int set_file_descriptor_limit(uint64_t limit);
|
||||
|
||||
// ***** Time helpers *****
|
||||
struct tm get_time();
|
||||
bool time_valid(struct tm sys_time);
|
||||
|
||||
// ***** math helpers *****
|
||||
|
||||
// map x from [a1, a2] to [b1, b2]
|
||||
template <typename T>
|
||||
T map_val(T x, T a1, T a2, T b1, T b2) {
|
||||
x = std::clamp(x, a1, a2);
|
||||
T ra = a2 - a1;
|
||||
T rb = b2 - b1;
|
||||
return (x - a1) * rb / ra + b1;
|
||||
}
|
||||
|
||||
// ***** string helpers *****
|
||||
|
||||
template <typename... Args>
|
||||
std::string string_format(const std::string& format, Args... args) {
|
||||
size_t size = snprintf(nullptr, 0, format.c_str(), args...) + 1;
|
||||
std::unique_ptr<char[]> buf(new char[size]);
|
||||
snprintf(buf.get(), size, format.c_str(), args...);
|
||||
return std::string(buf.get(), buf.get() + size - 1);
|
||||
}
|
||||
|
||||
std::string getenv(const char* key, std::string default_val = "");
|
||||
int getenv(const char* key, int default_val);
|
||||
float getenv(const char* key, float default_val);
|
||||
|
||||
std::string hexdump(const uint8_t* in, const size_t size);
|
||||
std::string dir_name(std::string const& path);
|
||||
bool starts_with(const std::string &s1, const std::string &s2);
|
||||
bool ends_with(const std::string &s1, const std::string &s2);
|
||||
|
||||
// ***** random helpers *****
|
||||
int random_int(int min, int max);
|
||||
std::string random_string(std::string::size_type length);
|
||||
|
||||
// **** file helpers *****
|
||||
std::string read_file(const std::string& fn);
|
||||
std::map<std::string, std::string> read_files_in_dir(const std::string& path);
|
||||
int write_file(const char* path, const void* data, size_t size, int flags = O_WRONLY, mode_t mode = 0664);
|
||||
|
||||
FILE* safe_fopen(const char* filename, const char* mode);
|
||||
size_t safe_fwrite(const void * ptr, size_t size, size_t count, FILE * stream);
|
||||
int safe_fflush(FILE *stream);
|
||||
int safe_ioctl(int fd, unsigned long request, void *argp);
|
||||
|
||||
std::string readlink(const std::string& path);
|
||||
bool file_exists(const std::string& fn);
|
||||
bool create_directories(const std::string &dir, mode_t mode);
|
||||
|
||||
std::string check_output(const std::string& command);
|
||||
|
||||
inline void sleep_for(const int milliseconds) {
|
||||
if (milliseconds > 0) {
|
||||
std::this_thread::sleep_for(std::chrono::milliseconds(milliseconds));
|
||||
}
|
||||
}
|
||||
|
||||
} // namespace util
|
||||
|
||||
class ExitHandler {
|
||||
public:
|
||||
ExitHandler() {
|
||||
std::signal(SIGINT, (sighandler_t)set_do_exit);
|
||||
std::signal(SIGTERM, (sighandler_t)set_do_exit);
|
||||
|
||||
#ifndef __APPLE__
|
||||
std::signal(SIGPWR, (sighandler_t)set_do_exit);
|
||||
#endif
|
||||
}
|
||||
inline static std::atomic<bool> power_failure = false;
|
||||
inline static std::atomic<int> signal = 0;
|
||||
inline operator bool() { return do_exit; }
|
||||
inline ExitHandler& operator=(bool v) {
|
||||
signal = 0;
|
||||
do_exit = v;
|
||||
return *this;
|
||||
}
|
||||
private:
|
||||
static void set_do_exit(int sig) {
|
||||
#ifndef __APPLE__
|
||||
power_failure = (sig == SIGPWR);
|
||||
#endif
|
||||
signal = sig;
|
||||
do_exit = true;
|
||||
}
|
||||
inline static std::atomic<bool> do_exit = false;
|
||||
};
|
||||
|
||||
struct unique_fd {
|
||||
unique_fd(int fd = -1) : fd_(fd) {}
|
||||
unique_fd& operator=(unique_fd&& uf) {
|
||||
fd_ = uf.fd_;
|
||||
uf.fd_ = -1;
|
||||
return *this;
|
||||
}
|
||||
~unique_fd() {
|
||||
if (fd_ != -1) close(fd_);
|
||||
}
|
||||
operator int() const { return fd_; }
|
||||
int fd_;
|
||||
};
|
||||
|
||||
class FirstOrderFilter {
|
||||
public:
|
||||
FirstOrderFilter(float x0, float ts, float dt, bool initialized = true) {
|
||||
k_ = (dt / ts) / (1.0 + dt / ts);
|
||||
x_ = x0;
|
||||
initialized_ = initialized;
|
||||
}
|
||||
inline float update(float x) {
|
||||
if (initialized_) {
|
||||
x_ = (1. - k_) * x_ + k_ * x;
|
||||
} else {
|
||||
initialized_ = true;
|
||||
x_ = x;
|
||||
}
|
||||
return x_;
|
||||
}
|
||||
inline void reset(float x) { x_ = x; }
|
||||
inline float x(){ return x_; }
|
||||
|
||||
private:
|
||||
float x_, k_;
|
||||
bool initialized_;
|
||||
};
|
||||
|
||||
template<typename T>
|
||||
void update_max_atomic(std::atomic<T>& max, T const& value) {
|
||||
T prev = max;
|
||||
while (prev < value && !max.compare_exchange_weak(prev, value)) {}
|
||||
}
|
||||
11
common/utils.py
Normal file
11
common/utils.py
Normal file
@@ -0,0 +1,11 @@
|
||||
class Freezable:
|
||||
_frozen: bool = False
|
||||
|
||||
def freeze(self):
|
||||
if not self._frozen:
|
||||
self._frozen = True
|
||||
|
||||
def __setattr__(self, *args, **kwargs):
|
||||
if self._frozen:
|
||||
raise Exception("cannot modify frozen object")
|
||||
super().__setattr__(*args, **kwargs)
|
||||
@@ -1 +1 @@
|
||||
#define COMMA_VERSION "0.9.6"
|
||||
#define COMMA_VERSION "0.9.7"
|
||||
|
||||
11
common/watchdog.cc
Normal file
11
common/watchdog.cc
Normal file
@@ -0,0 +1,11 @@
|
||||
#include <string>
|
||||
|
||||
#include "common/watchdog.h"
|
||||
#include "common/util.h"
|
||||
|
||||
const std::string watchdog_fn_prefix = "/dev/shm/wd_"; // + <pid>
|
||||
|
||||
bool watchdog_kick(uint64_t ts) {
|
||||
static std::string fn = watchdog_fn_prefix + std::to_string(getpid());
|
||||
return util::write_file(fn.c_str(), &ts, sizeof(ts), O_WRONLY | O_CREAT) > 0;
|
||||
}
|
||||
5
common/watchdog.h
Normal file
5
common/watchdog.h
Normal file
@@ -0,0 +1,5 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
|
||||
bool watchdog_kick(uint64_t ts);
|
||||
Reference in New Issue
Block a user