wip
This commit is contained in:
2
common/transformations/.gitignore
vendored
Normal file
2
common/transformations/.gitignore
vendored
Normal file
@@ -0,0 +1,2 @@
|
||||
transformations
|
||||
transformations.cpp
|
||||
70
common/transformations/README.md
Normal file
70
common/transformations/README.md
Normal file
@@ -0,0 +1,70 @@
|
||||
|
||||
Reference Frames
|
||||
------
|
||||
Many reference frames are used throughout. This
|
||||
folder contains all helper functions needed to
|
||||
transform between them. Generally this is done
|
||||
by generating a rotation matrix and multiplying.
|
||||
|
||||
|
||||
| Name | [x, y, z] | Units | Notes |
|
||||
| :-------------: |:-------------:| :-----:| :----: |
|
||||
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
|
||||
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83. <br> This is the global Mesh3D frame. |
|
||||
| NED | [North, East, Down] | meters | Relative to earth's surface, useful for visualizing. |
|
||||
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame. <br> Relative to camera, **not imu.** <br> 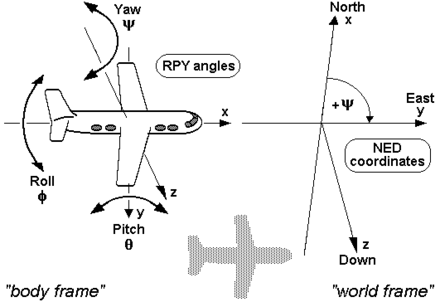|
|
||||
| Calibrated | [Forward, Right, Down] | meters | This is the frame the model outputs are in. <br> More details below. <br>|
|
||||
| Car | [Forward, Right, Down] | meters | This is useful for estimating position of points on the road. <br> More details below. <br>|
|
||||
| View | [Right, Down, Forward] | meters | Like device frame, but according to camera conventions. |
|
||||
| Camera | [u, v, focal] | pixels | Like view frame, but 2d on the camera image.|
|
||||
| Normalized Camera | [u / focal, v / focal, 1] | / | |
|
||||
| Model | [u, v, focal] | pixels | The sampled rectangle of the full camera frame the model uses. |
|
||||
| Normalized Model | [u / focal, v / focal, 1] | / | |
|
||||
|
||||
|
||||
|
||||
|
||||
Orientation Conventions
|
||||
------
|
||||
Quaternions, rotation matrices and euler angles are three
|
||||
equivalent representations of orientation and all three are
|
||||
used throughout the code base.
|
||||
|
||||
For euler angles the preferred convention is [roll, pitch, yaw]
|
||||
which corresponds to rotations around the [x, y, z] axes. All
|
||||
euler angles should always be in radians or radians/s unless
|
||||
for plotting or display purposes. For quaternions the hamilton
|
||||
notations is preferred which is [q<sub>w</sub>, q<sub>x</sub>, q<sub>y</sub>, q<sub>z</sub>]. All quaternions
|
||||
should always be normalized with a strictly positive q<sub>w</sub>. **These
|
||||
quaternions are a unique representation of orientation whereas euler angles
|
||||
or rotation matrices are not.**
|
||||
|
||||
To rotate from one frame into another with euler angles the
|
||||
convention is to rotate around roll, then pitch and then yaw,
|
||||
while rotating around the rotated axes, not the original axes.
|
||||
|
||||
|
||||
Car frame
|
||||
------
|
||||
Device frame is aligned with the road-facing camera used by openpilot. However, when controlling the vehicle it is helpful to think in a reference frame aligned with the vehicle. These two reference frames can be different.
|
||||
|
||||
The orientation of car frame is defined to be aligned with the car's direction of travel and the road plane when the vehicle is driving on a flat road and not turning. The origin of car frame is defined to be directly below device frame (in car frame), such that it is on the road plane. The position and orientation of this frame is not necessarily always aligned with the direction of travel or the road plane due to suspension movements and other effects.
|
||||
|
||||
|
||||
Calibrated frame
|
||||
------
|
||||
It is helpful for openpilot's driving model to take in images that look similar when mounted differently in different cars. To achieve this we "calibrate" the images by transforming it into calibrated frame. Calibrated frame is defined to be aligned with car frame in pitch and yaw, and aligned with device frame in roll. It also has the same origin as device frame.
|
||||
|
||||
|
||||
Example
|
||||
------
|
||||
To transform global Mesh3D positions and orientations (positions_ecef, quats_ecef) into the local frame described by the
|
||||
first position and orientation from Mesh3D one would do:
|
||||
```
|
||||
ecef_from_local = rot_from_quat(quats_ecef[0])
|
||||
local_from_ecef = ecef_from_local.T
|
||||
positions_local = np.einsum('ij,kj->ki', local_from_ecef, postions_ecef - positions_ecef[0])
|
||||
rotations_global = rot_from_quat(quats_ecef)
|
||||
rotations_local = np.einsum('ij,kjl->kil', local_from_ecef, rotations_global)
|
||||
eulers_local = euler_from_rot(rotations_local)
|
||||
```
|
||||
5
common/transformations/SConscript
Normal file
5
common/transformations/SConscript
Normal file
@@ -0,0 +1,5 @@
|
||||
Import('env', 'envCython')
|
||||
|
||||
transformations = env.Library('transformations', ['orientation.cc', 'coordinates.cc'])
|
||||
transformations_python = envCython.Program('transformations.so', 'transformations.pyx')
|
||||
Export('transformations', 'transformations_python')
|
||||
@@ -1,55 +1,74 @@
|
||||
import itertools
|
||||
import numpy as np
|
||||
from dataclasses import dataclass
|
||||
|
||||
import openpilot.common.transformations.orientation as orient
|
||||
|
||||
## -- hardcoded hardware params --
|
||||
eon_f_focal_length = 910.0
|
||||
eon_d_focal_length = 650.0
|
||||
tici_f_focal_length = 2648.0
|
||||
tici_e_focal_length = tici_d_focal_length = 567.0 # probably wrong? magnification is not consistent across frame
|
||||
@dataclass(frozen=True)
|
||||
class CameraConfig:
|
||||
width: int
|
||||
height: int
|
||||
focal_length: float
|
||||
|
||||
eon_f_frame_size = (1164, 874)
|
||||
eon_d_frame_size = (816, 612)
|
||||
tici_f_frame_size = tici_e_frame_size = tici_d_frame_size = (1928, 1208)
|
||||
@property
|
||||
def size(self):
|
||||
return (self.width, self.height)
|
||||
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
eon_fcam_intrinsics = np.array([
|
||||
[eon_f_focal_length, 0.0, float(eon_f_frame_size[0])/2],
|
||||
[0.0, eon_f_focal_length, float(eon_f_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
eon_intrinsics = eon_fcam_intrinsics # xx
|
||||
@property
|
||||
def intrinsics(self):
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
return np.array([
|
||||
[self.focal_length, 0.0, float(self.width)/2],
|
||||
[0.0, self.focal_length, float(self.height)/2],
|
||||
[0.0, 0.0, 1.0]
|
||||
])
|
||||
|
||||
eon_dcam_intrinsics = np.array([
|
||||
[eon_d_focal_length, 0.0, float(eon_d_frame_size[0])/2],
|
||||
[0.0, eon_d_focal_length, float(eon_d_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
@property
|
||||
def intrinsics_inv(self):
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
return np.linalg.inv(self.intrinsics)
|
||||
|
||||
tici_fcam_intrinsics = np.array([
|
||||
[tici_f_focal_length, 0.0, float(tici_f_frame_size[0])/2],
|
||||
[0.0, tici_f_focal_length, float(tici_f_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
@dataclass(frozen=True)
|
||||
class _NoneCameraConfig(CameraConfig):
|
||||
width: int = 0
|
||||
height: int = 0
|
||||
focal_length: float = 0
|
||||
|
||||
tici_dcam_intrinsics = np.array([
|
||||
[tici_d_focal_length, 0.0, float(tici_d_frame_size[0])/2],
|
||||
[0.0, tici_d_focal_length, float(tici_d_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
@dataclass(frozen=True)
|
||||
class DeviceCameraConfig:
|
||||
fcam: CameraConfig
|
||||
dcam: CameraConfig
|
||||
ecam: CameraConfig
|
||||
|
||||
tici_ecam_intrinsics = tici_dcam_intrinsics
|
||||
def all_cams(self):
|
||||
for cam in ['fcam', 'dcam', 'ecam']:
|
||||
if not isinstance(getattr(self, cam), _NoneCameraConfig):
|
||||
yield cam, getattr(self, cam)
|
||||
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
eon_fcam_intrinsics_inv = np.linalg.inv(eon_fcam_intrinsics)
|
||||
eon_intrinsics_inv = eon_fcam_intrinsics_inv # xx
|
||||
_ar_ox_fisheye = CameraConfig(1928, 1208, 567.0) # focal length probably wrong? magnification is not consistent across frame
|
||||
_os_fisheye = CameraConfig(2688, 1520, 567.0 / 2 * 3)
|
||||
_ar_ox_config = DeviceCameraConfig(CameraConfig(1928, 1208, 2648.0), _ar_ox_fisheye, _ar_ox_fisheye)
|
||||
_os_config = DeviceCameraConfig(CameraConfig(2688, 1520, 2648.0 * 2 / 3), _os_fisheye, _os_fisheye)
|
||||
_neo_config = DeviceCameraConfig(CameraConfig(1164, 874, 910.0), CameraConfig(816, 612, 650.0), _NoneCameraConfig())
|
||||
|
||||
tici_fcam_intrinsics_inv = np.linalg.inv(tici_fcam_intrinsics)
|
||||
tici_ecam_intrinsics_inv = np.linalg.inv(tici_ecam_intrinsics)
|
||||
DEVICE_CAMERAS = {
|
||||
# A "device camera" is defined by a device type and sensor
|
||||
|
||||
# sensor type was never set on eon/neo/two
|
||||
("neo", "unknown"): _neo_config,
|
||||
# unknown here is AR0231, field was added with OX03C10 support
|
||||
("tici", "unknown"): _ar_ox_config,
|
||||
|
||||
FULL_FRAME_SIZE = tici_f_frame_size
|
||||
FOCAL = tici_f_focal_length
|
||||
fcam_intrinsics = tici_fcam_intrinsics
|
||||
|
||||
W, H = FULL_FRAME_SIZE[0], FULL_FRAME_SIZE[1]
|
||||
# before deviceState.deviceType was set, assume tici AR config
|
||||
("unknown", "ar0231"): _ar_ox_config,
|
||||
("unknown", "ox03c10"): _ar_ox_config,
|
||||
|
||||
# simulator (emulates a tici)
|
||||
("pc", "unknown"): _ar_ox_config,
|
||||
}
|
||||
prods = itertools.product(('tici', 'tizi', 'mici'), (('ar0231', _ar_ox_config), ('ox03c10', _ar_ox_config), ('os04c10', _os_config)))
|
||||
DEVICE_CAMERAS.update({(d, c[0]): c[1] for d, c in prods})
|
||||
|
||||
# device/mesh : x->forward, y-> right, z->down
|
||||
# view : x->right, y->down, z->forward
|
||||
@@ -93,7 +112,7 @@ def roll_from_ke(m):
|
||||
-(m[0, 0] - m[0, 1] * m[2, 0] / m[2, 1]))
|
||||
|
||||
|
||||
def normalize(img_pts, intrinsics=fcam_intrinsics):
|
||||
def normalize(img_pts, intrinsics):
|
||||
# normalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
intrinsics_inv = np.linalg.inv(intrinsics)
|
||||
@@ -106,7 +125,7 @@ def normalize(img_pts, intrinsics=fcam_intrinsics):
|
||||
return img_pts_normalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def denormalize(img_pts, intrinsics=fcam_intrinsics, width=np.inf, height=np.inf):
|
||||
def denormalize(img_pts, intrinsics, width=np.inf, height=np.inf):
|
||||
# denormalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
img_pts = np.array(img_pts)
|
||||
@@ -123,7 +142,7 @@ def denormalize(img_pts, intrinsics=fcam_intrinsics, width=np.inf, height=np.inf
|
||||
return img_pts_denormalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def get_calib_from_vp(vp, intrinsics=fcam_intrinsics):
|
||||
def get_calib_from_vp(vp, intrinsics):
|
||||
vp_norm = normalize(vp, intrinsics)
|
||||
yaw_calib = np.arctan(vp_norm[0])
|
||||
pitch_calib = -np.arctan(vp_norm[1]*np.cos(yaw_calib))
|
||||
|
||||
100
common/transformations/coordinates.cc
Normal file
100
common/transformations/coordinates.cc
Normal file
@@ -0,0 +1,100 @@
|
||||
#define _USE_MATH_DEFINES
|
||||
|
||||
#include "common/transformations/coordinates.hpp"
|
||||
|
||||
#include <iostream>
|
||||
#include <cmath>
|
||||
#include <eigen3/Eigen/Dense>
|
||||
|
||||
double a = 6378137; // lgtm [cpp/short-global-name]
|
||||
double b = 6356752.3142; // lgtm [cpp/short-global-name]
|
||||
double esq = 6.69437999014 * 0.001; // lgtm [cpp/short-global-name]
|
||||
double e1sq = 6.73949674228 * 0.001;
|
||||
|
||||
|
||||
static Geodetic to_degrees(Geodetic geodetic){
|
||||
geodetic.lat = RAD2DEG(geodetic.lat);
|
||||
geodetic.lon = RAD2DEG(geodetic.lon);
|
||||
return geodetic;
|
||||
}
|
||||
|
||||
static Geodetic to_radians(Geodetic geodetic){
|
||||
geodetic.lat = DEG2RAD(geodetic.lat);
|
||||
geodetic.lon = DEG2RAD(geodetic.lon);
|
||||
return geodetic;
|
||||
}
|
||||
|
||||
|
||||
ECEF geodetic2ecef(Geodetic g){
|
||||
g = to_radians(g);
|
||||
double xi = sqrt(1.0 - esq * pow(sin(g.lat), 2));
|
||||
double x = (a / xi + g.alt) * cos(g.lat) * cos(g.lon);
|
||||
double y = (a / xi + g.alt) * cos(g.lat) * sin(g.lon);
|
||||
double z = (a / xi * (1.0 - esq) + g.alt) * sin(g.lat);
|
||||
return {x, y, z};
|
||||
}
|
||||
|
||||
Geodetic ecef2geodetic(ECEF e){
|
||||
// Convert from ECEF to geodetic using Ferrari's methods
|
||||
// https://en.wikipedia.org/wiki/Geographic_coordinate_conversion#Ferrari.27s_solution
|
||||
double x = e.x;
|
||||
double y = e.y;
|
||||
double z = e.z;
|
||||
|
||||
double r = sqrt(x * x + y * y);
|
||||
double Esq = a * a - b * b;
|
||||
double F = 54 * b * b * z * z;
|
||||
double G = r * r + (1 - esq) * z * z - esq * Esq;
|
||||
double C = (esq * esq * F * r * r) / (pow(G, 3));
|
||||
double S = cbrt(1 + C + sqrt(C * C + 2 * C));
|
||||
double P = F / (3 * pow((S + 1 / S + 1), 2) * G * G);
|
||||
double Q = sqrt(1 + 2 * esq * esq * P);
|
||||
double r_0 = -(P * esq * r) / (1 + Q) + sqrt(0.5 * a * a*(1 + 1.0 / Q) - P * (1 - esq) * z * z / (Q * (1 + Q)) - 0.5 * P * r * r);
|
||||
double U = sqrt(pow((r - esq * r_0), 2) + z * z);
|
||||
double V = sqrt(pow((r - esq * r_0), 2) + (1 - esq) * z * z);
|
||||
double Z_0 = b * b * z / (a * V);
|
||||
double h = U * (1 - b * b / (a * V));
|
||||
|
||||
double lat = atan((z + e1sq * Z_0) / r);
|
||||
double lon = atan2(y, x);
|
||||
|
||||
return to_degrees({lat, lon, h});
|
||||
}
|
||||
|
||||
LocalCoord::LocalCoord(Geodetic g, ECEF e){
|
||||
init_ecef << e.x, e.y, e.z;
|
||||
|
||||
g = to_radians(g);
|
||||
|
||||
ned2ecef_matrix <<
|
||||
-sin(g.lat)*cos(g.lon), -sin(g.lon), -cos(g.lat)*cos(g.lon),
|
||||
-sin(g.lat)*sin(g.lon), cos(g.lon), -cos(g.lat)*sin(g.lon),
|
||||
cos(g.lat), 0, -sin(g.lat);
|
||||
ecef2ned_matrix = ned2ecef_matrix.transpose();
|
||||
}
|
||||
|
||||
NED LocalCoord::ecef2ned(ECEF e) {
|
||||
Eigen::Vector3d ecef;
|
||||
ecef << e.x, e.y, e.z;
|
||||
|
||||
Eigen::Vector3d ned = (ecef2ned_matrix * (ecef - init_ecef));
|
||||
return {ned[0], ned[1], ned[2]};
|
||||
}
|
||||
|
||||
ECEF LocalCoord::ned2ecef(NED n) {
|
||||
Eigen::Vector3d ned;
|
||||
ned << n.n, n.e, n.d;
|
||||
|
||||
Eigen::Vector3d ecef = (ned2ecef_matrix * ned) + init_ecef;
|
||||
return {ecef[0], ecef[1], ecef[2]};
|
||||
}
|
||||
|
||||
NED LocalCoord::geodetic2ned(Geodetic g) {
|
||||
ECEF e = ::geodetic2ecef(g);
|
||||
return ecef2ned(e);
|
||||
}
|
||||
|
||||
Geodetic LocalCoord::ned2geodetic(NED n){
|
||||
ECEF e = ned2ecef(n);
|
||||
return ::ecef2geodetic(e);
|
||||
}
|
||||
@@ -1,19 +1,11 @@
|
||||
import numpy as np
|
||||
|
||||
from openpilot.common.transformations.orientation import rot_from_euler
|
||||
from openpilot.common.transformations.camera import (
|
||||
FULL_FRAME_SIZE, get_view_frame_from_calib_frame, view_frame_from_device_frame,
|
||||
eon_fcam_intrinsics, tici_ecam_intrinsics, tici_fcam_intrinsics)
|
||||
from openpilot.common.transformations.camera import get_view_frame_from_calib_frame, view_frame_from_device_frame
|
||||
|
||||
# segnet
|
||||
SEGNET_SIZE = (512, 384)
|
||||
|
||||
def get_segnet_frame_from_camera_frame(segnet_size=SEGNET_SIZE, full_frame_size=FULL_FRAME_SIZE):
|
||||
return np.array([[float(segnet_size[0]) / full_frame_size[0], 0.0],
|
||||
[0.0, float(segnet_size[1]) / full_frame_size[1]]])
|
||||
segnet_frame_from_camera_frame = get_segnet_frame_from_camera_frame() # xx
|
||||
|
||||
|
||||
# MED model
|
||||
MEDMODEL_INPUT_SIZE = (512, 256)
|
||||
MEDMODEL_YUV_SIZE = (MEDMODEL_INPUT_SIZE[0], MEDMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
@@ -63,16 +55,9 @@ calib_from_medmodel = np.linalg.inv(medmodel_frame_from_calib_frame[:, :3])
|
||||
calib_from_sbigmodel = np.linalg.inv(sbigmodel_frame_from_calib_frame[:, :3])
|
||||
|
||||
# This function is verified to give similar results to xx.uncommon.utils.transform_img
|
||||
def get_warp_matrix(device_from_calib_euler: np.ndarray, wide_camera: bool = False, bigmodel_frame: bool = False, tici: bool = True) -> np.ndarray:
|
||||
if tici and wide_camera:
|
||||
cam_intrinsics = tici_ecam_intrinsics
|
||||
elif tici:
|
||||
cam_intrinsics = tici_fcam_intrinsics
|
||||
else:
|
||||
cam_intrinsics = eon_fcam_intrinsics
|
||||
|
||||
def get_warp_matrix(device_from_calib_euler: np.ndarray, intrinsics: np.ndarray, bigmodel_frame: bool = False) -> np.ndarray:
|
||||
calib_from_model = calib_from_sbigmodel if bigmodel_frame else calib_from_medmodel
|
||||
device_from_calib = rot_from_euler(device_from_calib_euler)
|
||||
camera_from_calib = cam_intrinsics @ view_frame_from_device_frame @ device_from_calib
|
||||
camera_from_calib = intrinsics @ view_frame_from_device_frame @ device_from_calib
|
||||
warp_matrix: np.ndarray = camera_from_calib @ calib_from_model
|
||||
return warp_matrix
|
||||
|
||||
144
common/transformations/orientation.cc
Normal file
144
common/transformations/orientation.cc
Normal file
@@ -0,0 +1,144 @@
|
||||
#define _USE_MATH_DEFINES
|
||||
|
||||
#include <iostream>
|
||||
#include <cmath>
|
||||
#include <eigen3/Eigen/Dense>
|
||||
|
||||
#include "common/transformations/orientation.hpp"
|
||||
#include "common/transformations/coordinates.hpp"
|
||||
|
||||
Eigen::Quaterniond ensure_unique(Eigen::Quaterniond quat){
|
||||
if (quat.w() > 0){
|
||||
return quat;
|
||||
} else {
|
||||
return Eigen::Quaterniond(-quat.w(), -quat.x(), -quat.y(), -quat.z());
|
||||
}
|
||||
}
|
||||
|
||||
Eigen::Quaterniond euler2quat(Eigen::Vector3d euler){
|
||||
Eigen::Quaterniond q;
|
||||
|
||||
q = Eigen::AngleAxisd(euler(2), Eigen::Vector3d::UnitZ())
|
||||
* Eigen::AngleAxisd(euler(1), Eigen::Vector3d::UnitY())
|
||||
* Eigen::AngleAxisd(euler(0), Eigen::Vector3d::UnitX());
|
||||
return ensure_unique(q);
|
||||
}
|
||||
|
||||
|
||||
Eigen::Vector3d quat2euler(Eigen::Quaterniond quat){
|
||||
// TODO: switch to eigen implementation if the range of the Euler angles doesn't matter anymore
|
||||
// Eigen::Vector3d euler = quat.toRotationMatrix().eulerAngles(2, 1, 0);
|
||||
// return {euler(2), euler(1), euler(0)};
|
||||
double gamma = atan2(2 * (quat.w() * quat.x() + quat.y() * quat.z()), 1 - 2 * (quat.x()*quat.x() + quat.y()*quat.y()));
|
||||
double asin_arg_clipped = std::clamp(2 * (quat.w() * quat.y() - quat.z() * quat.x()), -1.0, 1.0);
|
||||
double theta = asin(asin_arg_clipped);
|
||||
double psi = atan2(2 * (quat.w() * quat.z() + quat.x() * quat.y()), 1 - 2 * (quat.y()*quat.y() + quat.z()*quat.z()));
|
||||
return {gamma, theta, psi};
|
||||
}
|
||||
|
||||
Eigen::Matrix3d quat2rot(Eigen::Quaterniond quat){
|
||||
return quat.toRotationMatrix();
|
||||
}
|
||||
|
||||
Eigen::Quaterniond rot2quat(const Eigen::Matrix3d &rot){
|
||||
return ensure_unique(Eigen::Quaterniond(rot));
|
||||
}
|
||||
|
||||
Eigen::Matrix3d euler2rot(Eigen::Vector3d euler){
|
||||
return quat2rot(euler2quat(euler));
|
||||
}
|
||||
|
||||
Eigen::Vector3d rot2euler(const Eigen::Matrix3d &rot){
|
||||
return quat2euler(rot2quat(rot));
|
||||
}
|
||||
|
||||
Eigen::Matrix3d rot_matrix(double roll, double pitch, double yaw){
|
||||
return euler2rot({roll, pitch, yaw});
|
||||
}
|
||||
|
||||
Eigen::Matrix3d rot(Eigen::Vector3d axis, double angle){
|
||||
Eigen::Quaterniond q;
|
||||
q = Eigen::AngleAxisd(angle, axis);
|
||||
return q.toRotationMatrix();
|
||||
}
|
||||
|
||||
|
||||
Eigen::Vector3d ecef_euler_from_ned(ECEF ecef_init, Eigen::Vector3d ned_pose) {
|
||||
/*
|
||||
Using Rotations to Build Aerospace Coordinate Systems
|
||||
Don Koks
|
||||
https://apps.dtic.mil/dtic/tr/fulltext/u2/a484864.pdf
|
||||
*/
|
||||
LocalCoord converter = LocalCoord(ecef_init);
|
||||
Eigen::Vector3d zero = ecef_init.to_vector();
|
||||
|
||||
Eigen::Vector3d x0 = converter.ned2ecef({1, 0, 0}).to_vector() - zero;
|
||||
Eigen::Vector3d y0 = converter.ned2ecef({0, 1, 0}).to_vector() - zero;
|
||||
Eigen::Vector3d z0 = converter.ned2ecef({0, 0, 1}).to_vector() - zero;
|
||||
|
||||
Eigen::Vector3d x1 = rot(z0, ned_pose(2)) * x0;
|
||||
Eigen::Vector3d y1 = rot(z0, ned_pose(2)) * y0;
|
||||
Eigen::Vector3d z1 = rot(z0, ned_pose(2)) * z0;
|
||||
|
||||
Eigen::Vector3d x2 = rot(y1, ned_pose(1)) * x1;
|
||||
Eigen::Vector3d y2 = rot(y1, ned_pose(1)) * y1;
|
||||
Eigen::Vector3d z2 = rot(y1, ned_pose(1)) * z1;
|
||||
|
||||
Eigen::Vector3d x3 = rot(x2, ned_pose(0)) * x2;
|
||||
Eigen::Vector3d y3 = rot(x2, ned_pose(0)) * y2;
|
||||
|
||||
|
||||
x0 = Eigen::Vector3d(1, 0, 0);
|
||||
y0 = Eigen::Vector3d(0, 1, 0);
|
||||
z0 = Eigen::Vector3d(0, 0, 1);
|
||||
|
||||
double psi = atan2(x3.dot(y0), x3.dot(x0));
|
||||
double theta = atan2(-x3.dot(z0), sqrt(pow(x3.dot(x0), 2) + pow(x3.dot(y0), 2)));
|
||||
|
||||
y2 = rot(z0, psi) * y0;
|
||||
z2 = rot(y2, theta) * z0;
|
||||
|
||||
double phi = atan2(y3.dot(z2), y3.dot(y2));
|
||||
|
||||
return {phi, theta, psi};
|
||||
}
|
||||
|
||||
Eigen::Vector3d ned_euler_from_ecef(ECEF ecef_init, Eigen::Vector3d ecef_pose){
|
||||
/*
|
||||
Using Rotations to Build Aerospace Coordinate Systems
|
||||
Don Koks
|
||||
https://apps.dtic.mil/dtic/tr/fulltext/u2/a484864.pdf
|
||||
*/
|
||||
LocalCoord converter = LocalCoord(ecef_init);
|
||||
|
||||
Eigen::Vector3d x0 = Eigen::Vector3d(1, 0, 0);
|
||||
Eigen::Vector3d y0 = Eigen::Vector3d(0, 1, 0);
|
||||
Eigen::Vector3d z0 = Eigen::Vector3d(0, 0, 1);
|
||||
|
||||
Eigen::Vector3d x1 = rot(z0, ecef_pose(2)) * x0;
|
||||
Eigen::Vector3d y1 = rot(z0, ecef_pose(2)) * y0;
|
||||
Eigen::Vector3d z1 = rot(z0, ecef_pose(2)) * z0;
|
||||
|
||||
Eigen::Vector3d x2 = rot(y1, ecef_pose(1)) * x1;
|
||||
Eigen::Vector3d y2 = rot(y1, ecef_pose(1)) * y1;
|
||||
Eigen::Vector3d z2 = rot(y1, ecef_pose(1)) * z1;
|
||||
|
||||
Eigen::Vector3d x3 = rot(x2, ecef_pose(0)) * x2;
|
||||
Eigen::Vector3d y3 = rot(x2, ecef_pose(0)) * y2;
|
||||
|
||||
Eigen::Vector3d zero = ecef_init.to_vector();
|
||||
x0 = converter.ned2ecef({1, 0, 0}).to_vector() - zero;
|
||||
y0 = converter.ned2ecef({0, 1, 0}).to_vector() - zero;
|
||||
z0 = converter.ned2ecef({0, 0, 1}).to_vector() - zero;
|
||||
|
||||
double psi = atan2(x3.dot(y0), x3.dot(x0));
|
||||
double theta = atan2(-x3.dot(z0), sqrt(pow(x3.dot(x0), 2) + pow(x3.dot(y0), 2)));
|
||||
|
||||
y2 = rot(z0, psi) * y0;
|
||||
z2 = rot(y2, theta) * z0;
|
||||
|
||||
double phi = atan2(y3.dot(z2), y3.dot(y2));
|
||||
|
||||
return {phi, theta, psi};
|
||||
}
|
||||
|
||||
@@ -1,5 +1,5 @@
|
||||
import numpy as np
|
||||
from typing import Callable
|
||||
from collections.abc import Callable
|
||||
|
||||
from openpilot.common.transformations.transformations import (ecef_euler_from_ned_single,
|
||||
euler2quat_single,
|
||||
|
||||
0
common/transformations/tests/__init__.py
Normal file
0
common/transformations/tests/__init__.py
Normal file
109
common/transformations/tests/test_coordinates.py
Normal file
109
common/transformations/tests/test_coordinates.py
Normal file
@@ -0,0 +1,109 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
import openpilot.common.transformations.coordinates as coord
|
||||
|
||||
geodetic_positions = np.array([[37.7610403, -122.4778699, 115],
|
||||
[27.4840915, -68.5867592, 2380],
|
||||
[32.4916858, -113.652821, -6],
|
||||
[15.1392514, 103.6976037, 24],
|
||||
[24.2302229, 44.2835412, 1650]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ecef_positions_offset = np.array([[-2711004.46961115, -4259099.33540613, 3884605.16002147],
|
||||
[ 2068074.30639499, -5273413.78835412, 2927012.48741131],
|
||||
[-2160344.53748176, -4932586.20092211, 3406636.2962545 ],
|
||||
[-1458211.98517094, 5983151.11161276, 1655077.02698447],
|
||||
[ 4167271.20055269, 4064398.22619263, 2602238.95265847]])
|
||||
|
||||
|
||||
ned_offsets = np.array([[78.722153649976391, 24.396208657446344, 60.343017506838436],
|
||||
[10.699003365155221, 37.319278617604269, 4.1084100025050407],
|
||||
[95.282646251726959, 61.266689955574428, -25.376506058505054],
|
||||
[68.535769283630003, -56.285970011848889, -100.54840137956515],
|
||||
[-33.066609321880179, 46.549821994306861, -84.062540548335591]])
|
||||
|
||||
ecef_init_batch = np.array([2068042.69652729, -5273435.40316622, 2927004.89190746])
|
||||
ecef_positions_offset_batch = np.array([[ 2068089.41454771, -5273434.46829148, 2927074.04783672],
|
||||
[ 2068103.31628647, -5273393.92275431, 2927102.08725987],
|
||||
[ 2068108.49939636, -5273359.27047121, 2927045.07091581],
|
||||
[ 2068075.12395611, -5273381.69432566, 2927041.08207992],
|
||||
[ 2068060.72033399, -5273430.6061505, 2927094.54928305]])
|
||||
|
||||
ned_offsets_batch = np.array([[ 53.88103168, 43.83445935, -46.27488057],
|
||||
[ 93.83378995, 71.57943024, -30.23113187],
|
||||
[ 57.26725796, 89.05602684, 23.02265814],
|
||||
[ 49.71775195, 49.79767572, 17.15351015],
|
||||
[ 78.56272609, 18.53100158, -43.25290759]])
|
||||
|
||||
|
||||
class TestNED(unittest.TestCase):
|
||||
def test_small_distances(self):
|
||||
start_geodetic = np.array([33.8042184, -117.888593, 0.0])
|
||||
local_coord = coord.LocalCoord.from_geodetic(start_geodetic)
|
||||
|
||||
start_ned = local_coord.geodetic2ned(start_geodetic)
|
||||
np.testing.assert_array_equal(start_ned, np.zeros(3,))
|
||||
|
||||
west_geodetic = start_geodetic + [0, -0.0005, 0]
|
||||
west_ned = local_coord.geodetic2ned(west_geodetic)
|
||||
self.assertLess(np.abs(west_ned[0]), 1e-3)
|
||||
self.assertLess(west_ned[1], 0)
|
||||
|
||||
southwest_geodetic = start_geodetic + [-0.0005, -0.002, 0]
|
||||
southwest_ned = local_coord.geodetic2ned(southwest_geodetic)
|
||||
self.assertLess(southwest_ned[0], 0)
|
||||
self.assertLess(southwest_ned[1], 0)
|
||||
|
||||
def test_ecef_geodetic(self):
|
||||
# testing single
|
||||
np.testing.assert_allclose(ecef_positions[0], coord.geodetic2ecef(geodetic_positions[0]), rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0, :2], coord.ecef2geodetic(ecef_positions[0])[:2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0, 2], coord.ecef2geodetic(ecef_positions[0])[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
np.testing.assert_allclose(geodetic_positions[:, :2], coord.ecef2geodetic(ecef_positions)[:, :2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[:, 2], coord.ecef2geodetic(ecef_positions)[:, 2], rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(ecef_positions, coord.geodetic2ecef(geodetic_positions), rtol=1e-9)
|
||||
|
||||
|
||||
def test_ned(self):
|
||||
for ecef_pos in ecef_positions:
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
ecef_pos_moved = ecef_pos + [25, -25, 25]
|
||||
ecef_pos_moved_double_converted = converter.ned2ecef(converter.ecef2ned(ecef_pos_moved))
|
||||
np.testing.assert_allclose(ecef_pos_moved, ecef_pos_moved_double_converted, rtol=1e-9)
|
||||
|
||||
for geo_pos in geodetic_positions:
|
||||
converter = coord.LocalCoord.from_geodetic(geo_pos)
|
||||
geo_pos_moved = geo_pos + np.array([0, 0, 10])
|
||||
geo_pos_double_converted_moved = converter.ned2geodetic(converter.geodetic2ned(geo_pos) + np.array([0, 0, -10]))
|
||||
np.testing.assert_allclose(geo_pos_moved[:2], geo_pos_double_converted_moved[:2], rtol=1e-9, atol=1e-6)
|
||||
np.testing.assert_allclose(geo_pos_moved[2], geo_pos_double_converted_moved[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_saved_results(self):
|
||||
for i, ecef_pos in enumerate(ecef_positions):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets[i]),
|
||||
ecef_positions_offset[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset[i]),
|
||||
ned_offsets[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_batch(self):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_init_batch)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset_batch),
|
||||
ned_offsets_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets_batch),
|
||||
ecef_positions_offset_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
68
common/transformations/tests/test_orientation.py
Normal file
68
common/transformations/tests/test_orientation.py
Normal file
@@ -0,0 +1,68 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
from openpilot.common.transformations.orientation import euler2quat, quat2euler, euler2rot, rot2euler, \
|
||||
rot2quat, quat2rot, \
|
||||
ned_euler_from_ecef
|
||||
|
||||
eulers = np.array([[ 1.46520501, 2.78688383, 2.92780854],
|
||||
[ 4.86909526, 3.60618161, 4.30648981],
|
||||
[ 3.72175965, 2.68763705, 5.43895988],
|
||||
[ 5.92306687, 5.69573614, 0.81100357],
|
||||
[ 0.67838374, 5.02402037, 2.47106426]])
|
||||
|
||||
quats = np.array([[ 0.66855182, -0.71500939, 0.19539353, 0.06017818],
|
||||
[ 0.43163717, 0.70013301, 0.28209145, 0.49389021],
|
||||
[ 0.44121991, -0.08252646, 0.34257534, 0.82532207],
|
||||
[ 0.88578382, -0.04515356, -0.32936046, 0.32383617],
|
||||
[ 0.06578165, 0.61282835, 0.07126891, 0.78424163]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ned_eulers = np.array([[ 0.46806039, -0.4881889 , 1.65697808],
|
||||
[-2.14525969, -0.36533066, 0.73813479],
|
||||
[-1.39523364, -0.58540761, -1.77376356],
|
||||
[-1.84220435, 0.61828016, -1.03310421],
|
||||
[ 2.50450101, 0.36304151, 0.33136365]])
|
||||
|
||||
|
||||
class TestOrientation(unittest.TestCase):
|
||||
def test_quat_euler(self):
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(eul), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(quats[i])), rtol=1e-6)
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(list(eul)), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(list(quats[i]))), rtol=1e-6)
|
||||
np.testing.assert_allclose(quats, euler2quat(eulers), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, euler2quat(quat2euler(quats)), rtol=1e-6)
|
||||
|
||||
def test_rot_euler(self):
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(eul))), rtol=1e-7)
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(list(eul)))), rtol=1e-7)
|
||||
np.testing.assert_allclose(euler2quat(eulers), euler2quat(rot2euler(euler2rot(eulers))), rtol=1e-7)
|
||||
|
||||
def test_rot_quat(self):
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(quat)), rtol=1e-7)
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(list(quat))), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, rot2quat(quat2rot(quats)), rtol=1e-7)
|
||||
|
||||
def test_euler_ned(self):
|
||||
for i in range(len(eulers)):
|
||||
np.testing.assert_allclose(ned_eulers[i], ned_euler_from_ecef(ecef_positions[i], eulers[i]), rtol=1e-7)
|
||||
#np.testing.assert_allclose(eulers[i], ecef_euler_from_ned(ecef_positions[i], ned_eulers[i]), rtol=1e-7)
|
||||
# np.testing.assert_allclose(ned_eulers, ned_euler_from_ecef(ecef_positions, eulers), rtol=1e-7)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
File diff suppressed because it is too large
Load Diff
Binary file not shown.
Reference in New Issue
Block a user